
Redes Industriales - Parte 2

.jpg)
César Cassiolato
Introducción
El medio físico se basa en el IEC61158-2, cuyas características son las siguientes:
- Transferencia de datos usando codificación Manchester, con tasa de 31.25 kbit/s.
- Para la señal de comunicación íntegro cada equipo debe alimentarse con el mínimo de 9 volts. El medio físico H1 permite que los equipos se alimenten vía barramiento. El mismo par de hilos que alimenta el equipo también suministra la señal de comunicación.
- Largura máxima de 1900 m sin repetidores.
- Usándose hasta 4 repetidores, la largura máxima puede alcanzar 10 Km.
- Un equipo Fieldbus debe poder comunicarse con 2 hasta 32 equipos en aplicación sin seguridad intrínseca y alimentación externa al cableado de comunicación.
- Un equipo Fieldbus debe poder comunicarse con 2 hasta 4 equipos en aplicación con seguridad intrínseca y sin alimentación externa.
- Un equipo Fieldbus debe poder comunicarse con 1 hasta 16 equipos en aplicación sin seguridad intrínseca y sin alimentación externa.
Nota: Se pueden conectar más equipos de lo que fue especificado, dependiendo del consumo de los equipos, de la fuente de energía y la característica de las barreras de seguridad intrínseca.
- Sin interrupción del barramiento cuando conectar o desconectar equipos mientras en funcionamiento.
- Topología de barramiento, árbol o estrella, o mixta.
La transmisión típica de un equipo suministra 10 mA a 31.25 kbits/s en una carga correspondiente de 50 Ohms, creando una señal de tensión modulada en 1.0 Volt pico a pico. La fuente de energía puede suministrar 9 a 32 VDC, pero en aplicaciones seguras (IS) debe satisfacer los requisitos de las barreras de seguridad intrínseca.
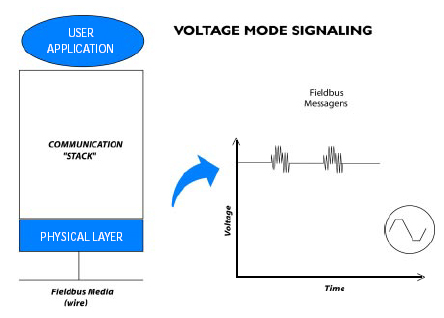
Figura 19 – Modo de Tensión de 231.25 kbits/s
La largura total del cableado es la suma de la largura del trunk y todos los spurs que, con el cable tipo A, es en máximo 1900 m en áreas no seguras. En áreas seguras es el máximo 1000 m y el cable tipo A y los spurs no pueden exceder 30 m.
En seguida están algunas pistas sobre cableado, blindaje y conexión a tierra, en la medida que la red digital debe estar siempre en estado de alerta a niveles de ruido, capacitancia e impedancia que pueden degradar las señales.
El estrato Data Link (Nivel de Enlace) garantiza la integridad del mensaje y también controla el acceso al medio de transmisión, mientras determina quien puede transmitir y cuando va a ocurrir la transmisión. El nivel de enlace garantiza que los datos lleguen al equipo correcto. Según el estrato Data Link pueden definirse dos tipos de equipos:
- Link Master: tiene capacidad para cambiarse en LAS.
- Basic Device: no tiene capacidad para cambiarse en LAS.
Hay tres maneras de acceder a la red:
- Pasaje de Token (bastón?! Credencial, llave, autenticación?): el token es el modo directo de iniciar una transación en el barramiento. Al terminar el envío de mensajes, el equipo repone el token en el LAS (Link Active Scheduler) que lo transmitirá al equipo que lo ha requerido, vía pre-configuración o vía escala.
- Respuesta inmediata: en este caso el amo dará una oportunidad a una estación contestar con un mensaje.
- Requisición de Token: un equipo requisita el token usando uno de los mensajes con la codificación para esta requisición, y el LAS, al recibirla, le envía el token cuando haya tiempo disponible en las etapas acíclicas de la escala.
El LAS controla y planea la comunicación en el barramiento. La actividades en el barramiento se controlan a través de diferentes comandos y, en modo de transmisión, se pasa a todos los equipos. Como el LAS siempre busca direcciones de equipos sin tags en la red, es posible conectarse dispositivos a cualquier momento durante la operación y estos se integrarán automáticamente en operación instantánea. En sistemas redundantes, con la falla del LAS, el equipo del tipo Link Master asume el papel de amo de apoyo durante la falla. Aun podemos comentar sobre el modelo Publisher/Subscriber (editor/suscritor), cuyo equipo puede producir o consumir variables transmitidas a través de la red usando el modelo de acceso de respuesta inmediata. Con una sola transacción, el editor puede enviar informaciones a todos los equipos de la red que las necesiten. Este es el modelo más eficiente en el cambio de informaciones, pues existe la optimización total entre los participantes de las transacciones.
Los servicios de comunicación usan la transmisión de datos de llamadas programadas (scheduled) y no- programadas (unscheduled). Las tareas que envuelven tiempos críticos, tales como el control de variables de proceso, son exclusivamente ejecutadas por los servicios programados, mientras la parametrización y funciones de diagnósticos son no programadas. El operador del sistema crea el Programa (schedule) durante la configuración del sistema FF, o, automáticamente, con las herramientas de configuración, según las estrategias de control. Periódicamente, el LAS hace una transmisión de la señal de sincronismo en el barramiento de manera que todos los equipos tienen exactamente el mismo tiempo de conexión de datos. En este tipo de transmisión no programada, el punto de tiempo y las secuencias son claramente definidas, caracterizando el llamado sistema deterministico. Basada en el Schedule, hay una lista de transmisión generada para definir cuando un equipo específico está listo para enviar sus datos.
Cada dispositivo recibe un Schedule separado que permite a la Dirección del Sistema saber exactamente cual la tarea a ejecutar y también cuando el se debe recibir o enviar el dato.
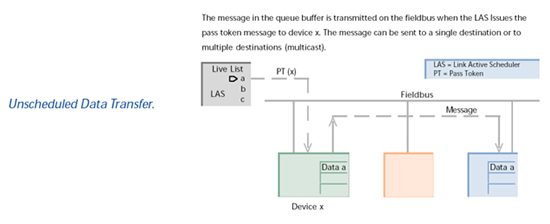
Figura 20 - Transferencia de Datos
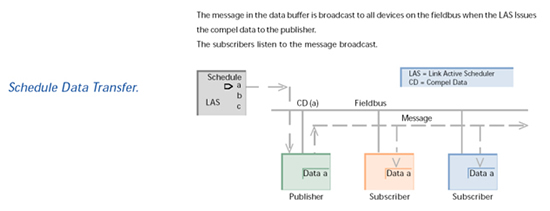
Figura 21 – Transferencia programada de datos
La lista de los equipos que contestan convenientemente el passaje de token (PT) llamase “Live List”. Periódicamente el LAS envía el Probe Node (PN) (Nudo de Sonda) a las direcciones que no están en el Live List, de manera que a cualquier momento se pueda conectar equipos. Estos, al contestar con un Probe Response (PR) serán incluidos en el Live List. Al removerse un equipo del Live List, el LAS enviará un mensaje en broadcast a todos los equipos informando los cambios. Esto permitirá que los Link Master mantengan una copia fiel de Live List.
El estrato de aplicación (Application Layer) suministra una interfaz al software aplicativo del equipo y definiera la manera de leer, escribir o ejecutar una tarea en una estación remota. El también define el modo como el mensaje deberá transmitirse. La supervisión definirá como inicializar la red, a través del Tag, atribuir una dirección, sincronización de tiempo, escalonamiento de transacciones o conexión de parámetros de entrada y salida de los bloques de función. El FAS y el FMS son la interfaz entre el estrato de data link y la aplicación del usuario. The FAS a través de sus servicios crea las VCTs (Virtual Communication Relationships) utilizadas en el estrato superior FMS en la ejecución de tareas. Las VCRs describen distintos tipos de procesos de comunicación y habilitan actividades asociadas al procesamiento más rápido. El Foundation Fieldbus utiliza tres tipos de VCRs:
- VCR Publisher/Subscriber: transmite datos de entrada y salida de los bloques de funcion;
- VCR Client/Server: usada em comunicaciones no programadas. Se usa para pedidos de inicialización a através de operador;
- Report Distribution communication: controla la operación de la red inspeccionando fallas y adicionando o removiendo equipos.
El FMS suministra los servicios de comunicación estándares. A cada tipo de dato se atribuyen servicios de comunicación, llamados object descriptions, que van a contener la definición de todos los tipos de mensajes estándares y que se accederán a través del diccionario de los objetos (Object Dictionary). Además, el FMS define las VFD (Virtual Field Devices) usadas para garantizar el acceso local a las informaciones de los equipos desde cualquier punto de la red, usando servicios de comunicación asociados.
La Aplicación del Usuario es en realidad donde la funcionalidad del equipo y de las herramientas tendrá espacio. En este nivel, transmisores, posicionadores, actuadores, conversores, hosts, etc. sirven de interfaz con el usuario. Puntos fundamentales del Foundation Fieldbus son la operabilidad y la intercambialidad entre los fabricantes y sus instrumentos, que se alcanzan con especificaciones abiertas y definidas uniformemente. Es en el nivel del usuario que se definirá el formato y la semántica de los datos que posibilitaron al equipo entender y ejecutar con inteligencia el manejo de las informaciones. El Foundation Fieldbus se basa en el concepto de los bloques de función (DI, AI), control de PID, cálculo matemático (bloque aritmético), cálculo de actuación (bloques DO, AO) y otros. Las transmisiones programadas se basan en los bloques de función.
Cada bloque tiene una tarea asociada a sus entradas o salidas. Existen varios bloques de función de estándares definidos, tales como AI, AO, CS, DI, DO, PID, etc. La cantidad de bloques de un equipo depende del fabricante. El bloque de recursos describe las características del equipo de campo, tales como el nombre del equipo, fabricante, número de serie, versiones de hardware y software. El bloque transductor expande la complejidad y las posibilidades de aplicación de un equipo. Sus datos permiten el funcionamiento de los parámetros de entrada y salida de un bloque de función, y se pueden usar en calibración, medición, posicionamiento, linealización, etc.
Lazo de Control Usando Bloques de Función
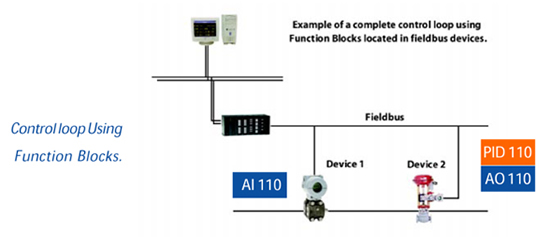
Figura 22 – Ejemplo de control usando bloques de función
Nuevos componentes se acrecen al modelo de bloques:
- Link Objects: definen los lazos entre los diferentes bloques de función, sean internos o externos.
- Alert Objects: permiten el informe de alarmes y eventos en la red fieldbus.
- Trend Objects: permiten el trend de las informaciones de los bloques de función y análisis en alto nivel.
- View Objects: son grupos de parámetros de bloques de función que se pueden enseñar rápidamente en tareas de monitoreo, configuración, mantenimiento y control, etc. Se dividen en dinámicas y estáticas, según los datos.
El grupo de parámetros de Views y Trenes aceleran el acceso a las informaciones.
Durante la puesta en marcha, el inicio de operaciones y el mantenimiento, y también al ejecutar funciones de diagnóstico, un sistema de comunicación abierto debe asegurar que el sistema de control puede acceder a todas las informaciones de todos los equipos de campo y dominar su control. La DD, Device Description, tiene todas las informaciones que garantizan estos requisitos y posibilitan entender la información del equipo para enseñarla de manera conveniente al usuario. Se escribe con el lenguaje DDL (Device Description Language), muy parecida al lenguaje C, para generar un archivo texto que, al convertirse a través del Tokenizer (herramienta generadora de DDs), puede distribuirse entre los equipos.
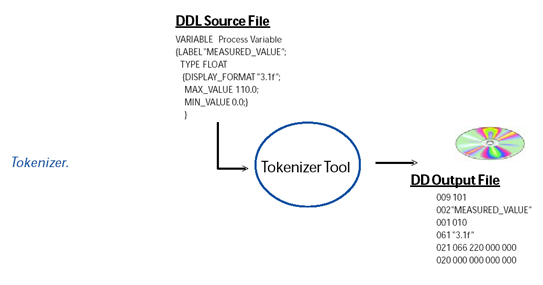
Figura 23 – Generando la DD
Las DDs se usan en conjunto con los archivos de capacidad escritos en el formato Common File Format (CFF), donde se definen los recursos de los equipos disponibles. Esto garantiza que en la condición offline, el host no utilize recursos indisponibles en el equipo.
El Supervisor de Sistema (System Management ) de cada equipo tiene las tareas siguientes:
- Sincronización de las actividades de datos en el tiempo, o sea, según la Programación de transmisión.
- Procesamiento cíclico de la lista de transmisión (solo el LAS) con la Programación predefinida.
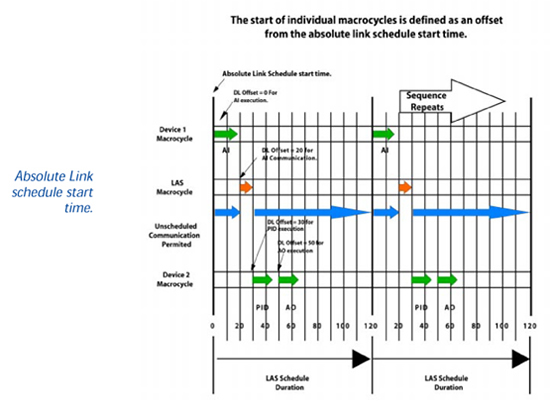
Figura 24 – Procesamiento cíclico de los bloques funcionales
Las tareas adicionales se atribuyen a la Supervisión del Sistema:
- Atribución automática de un Link Master al LAS si ocurre una falla en el LAS actual.
- Sincronización del reloj de la aplicación.
- Direccionamiento automático de las nuevas estaciones conectadas.
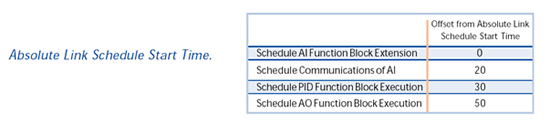
Figura 25 – Transmisiones programadas o no programadas. Cada equipo recibe una Programación separada, posibilitando a la Supervisión del Sistema saber exactamente cual tarea y cuando ejecutarla y cuando los datos deben enviarse o recibirse.
La programación de la comunicación y también los parámetros de los equipos deben ejecutarse antes de la puesta en marcha. Básicamente hay dos etapas: Etapa del Proyecto y Etapa de Configuración de los equipos.
Las DDs de todos los equipos de la red deben estar disponibles para la herramienta de configuración que determinará como las informaciones, según la estrategia de control, irán conectarse a través de las entradas y salidas de los bloques de función (los llamados links). Esta tara es fácilmente ejecutada con las interfaces gráficas de herramientas avanzadas de configuración, por ejemplo, el Syscon de SMAR.
.jpg)
Figura 26 – Conexión de los bloques de función para control en escala
La figura 26 muestra un control de escala cuyo valor de presión venido de un transmisor de presión se conecta al bloque de función PID. Este bloque puede implementarse, por ejemplo, en un posicionador de válvulas, lo cual a través del bloque AO también configura las tasas individuales de ejecución de los lazos individuales. Finalmente, el LAS y todos los Link Masters reciben la lista de transmisión según la Programación. La configuración del sistema está completa y la Supervisión del Sistema del LAS y los equipos pueden controlar todo el sistema.
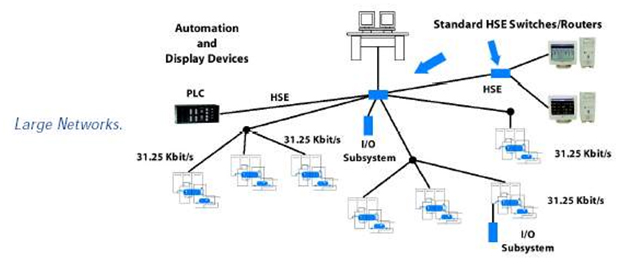
Figura 27 – Configuración de la red Fieldbus
El Foundation Fieldbus todavía tiene el HSE, High Speed Ethernet, cuyo Dispositivo de Enlace (por ejemplo, el DFI302 de SMAR, se usa para conectar equipos de campo distantes 31.25 kbit/s a una red FF estándar a 100 Mbit/s. Se aplica en redes de alta velocidad coninterfaces para sistemas de E/S que pueden ubicarse a 31.25 kbit/s o en el HSE.
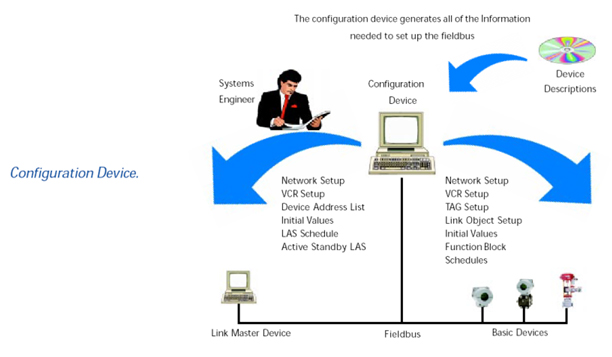
Figura 28 – Uso Del HSE en redes densas y abarcando subsistemas de E/S.
AS-interface
En 1990, en Alemania, un consorcio de compañías exitosas elaboró un sistema de barramiento para redes de sensores y actuadores, denominado Actuator Sensor Interface (Interfaz de Actuadores y Sensores, AS-Interface, o abreviadamente, AS-i) Este sistema surgió para satisfacer algunos requisitos definidos a partir de la experiencia de sus miembros fundadores y para proveer el mercado vuelto al uso del bit. De esta manera, la red AS-i se concibió para complementar los demás sistemas, simplificando y agilizando la conexión entre sensores y actuadores con sus respectivos controladores.
Un sistema industrial formado por redes AS-i se considera uno de los más económicos e ideal para la comunicación entre actuadores y sensores. Los beneficios de la utilización de una red AS-i van desde ahorro de hardware hasta el inicio de actividades de una red AS-i propiamente dicha.
Veamos algunos beneficios de la red AS-i:
Simplicidad
Una red AS-i es muy sencilla y requiere un cable único para conectar módulos de entradas y salidas de cualesquiera fabricantes. Los usuarios de una red AS-i no necesitan conocimientos profundos de sistemas industriales o protocolos de comunicación. Al contrario de otras redes digitales, la red AS-i no requiere terminadores y archivos de descripción de equipos. La simplicidad es su punto fuerte.
Desempeño
Los sistemas AS-i son eficaces e increíblemente rápidos, lo que los vuelve apropiados a sustituir sistemas grandes y costosos. Existen amos AS-i especialmente desarrollados para comunicarse con sistemas legados de control y promocionar una suave integración entre las tecnologías actuales. Lo mejor de todo es que esto realizase de manera simples y confiable.
Flexibilidad
La expandibilidad es muy sencilla, bastando conectar un módulo, dirigirlo y conectarlo al cable de la red. Verifique si el LED de alimentación está prendido y ya se lo puede conectar al módulo siguiente. La red AS-i soporta cualquier topología de cableado; estrella, barramiento, árbol, anillo o cualquier otra configuración hasta 100 metros de cable. O, entonces, con la adición de repetidores es posible expandir el sistema hasta 300 metros. La red AS-i es fácil de instalarse, pues no necesita terminadores en los terminales.
Costo
Las redes AS-i principalmente reducen el costo de cableado e instalación alrededor de 50% en comparación con otras redes convencionales. Eluso e un único cable para conexión con equipos discretos reducen la necesidad de gabinete, tubería y bandejas. El ahorro provisto de la utilización de la red pueden ser realmente importantes, pues pocos cables disminuyen los costos de instalación, puesta en marcha y, por ser una red sencilla, las horas gastas con ingeniería.
Las redes industriales AS-i se crearon para aplicaciones en ambientes automatizados, substituyendo las conexiones tradicionales de actuadores y sensores tel tipo llave (on-off) por un único barramiento . Además, es posible conectarse al barramiento sensores/actuadores que realizan una conversión analógica/digital, o viceversa. Tradicionalmente esas conexiones se hacen a través de pares de hilos conectados uno a uno, os los actuadores y sensores al controlador correspondiente, en general, un Controlador Lógico Programable (CLP).
El sistema AS-I se configura y controla por un amo, que programa la interfaz entre un controlador y el sistema AS-i. Este amo cambia informaciones continuas con todos los sensores y actuadores conectados al barramiento AS-i de manera predeterminada y cíclica.
La figura 29 ilustra el sistema todo, realzando sus principales componentes: cable, fuente AS-i con su circuito para desacople, el amo y el esclavo AS-i.
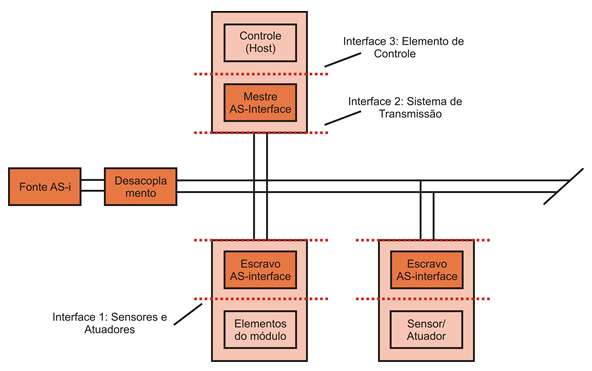
Figura 29 – Componentes e interfaces.
La red AS-Interface conecta los dispositivos mas simples de las soluciones de automatización. Un solo cable une actuadores y sensores con los niveles superiores de control. AS-Interface es un sistema estándar de red (EN 50295) abierto que interconecta de manera muy simple actuadores y sensores.
La conexión de los elementos puede hacerse en estructura de árbol, estrella, línea o una combinación de las anteriores. Como no existen conexiones convencionales y debido al número reducido de interconexiones en terminales y conectores, se reducen no solamente los costos y el tiempo de montaje, como también los errores.
En la tecnología de conexión por cables paralelos, cada contacto individual de un equipo se conecta separadamente con los terminales y bornes de sensores y actuadores. La red AS-i sustituye el conjunto tradicional de cables múltiples, cajas de pasaje, canaletas y conductos de cables por un simple cable desarrollado para redes AS-i.
La red AS-i se caracteriza por transmitir por el mismo par de hilos la alimentación de sensores y actuadores en 24Vcc y la información sobre el estado de ellos. La configuración máxima de la red es de 62 esclavos participantes, accedidos cíclicamente por un amo del nivel superior de control. El tiempo de reacción es corto, alrededor de 10ms de respuesta, para todos los esclavos de la red.
Anteriormente, sensores y actuadores necesitaban conectarse al controlador a través de terminales, conectores y terminales de bloques. AS-i posibilita la reducción de costos de instalación y mantenimiento, por habilitar el cambio de informaciones por un cable estándar de 2 hilos al mismo en que alimenta los equipos. Los esclavos se conectan directamente tonel barramiento sin necesidad de interconexión adicional.
Este cable flexible de dos vías se considera el estándar para la red AS-i. Hay otro cable de formato circular que debe usarse solamente por recomendación expresa del fabricante.
Este es un cable de alta tensión que cumple con los estándares CENELEC o DIN VDE 0281, es barato y fácil de encontrar, y se designa por H05VV-F 2X1.5.
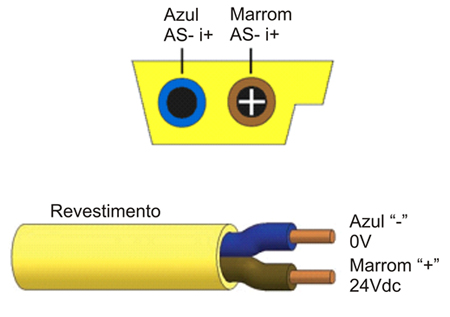
Figura 30 – Cables estándares de barramiento AS-i
DeviceNet
DeviceNet es una red multi-drop digital para conexión entre sensores, actuadores de sistemas de automación industrial. Ella se desarrolló para posibilitar máximas flexibilidad entre equipos de campo e interoperabilidad entre diferentes proveedores.
Originalmente presentada por Allen-Braley en 1994, DeviceNet transfirió su tecnología a ODVA en 1995. ODVA (Open DeviceNet Vendor Association) (Asociación de Proveedores Abiertos de DeviceNet) es una entidad no lucrativa compuesta por centenares de compañías en todo el mundo, las cuales mantienen, divulgan y promocionan el DeviceNet y otras redes basadas en el protocolo CIP (Common Industrial Protocol). Actualmente, ella reúne mas de 300 asociadas, de las cuales mas de 800 suministran productos DeviceNet.
La red DeviceNet se clasifica entre las redes llamadas devicebus, cuya característica principal son: alta velocidad, comunicación a nivel de byte abarcando comunicación con equipos discretos y analógicos y alto poder de diagnóstico de los dispositivos de la red.
La tecnología DeviceNet es un estándar abierto de automatización que tiene el objetivo de transportar 2 tipos principales de informaciones:
- datos cíclicos de sensores y actuadores, directamente relacionados al control y,
- datos acíclicos, indirectamente relacionados al control, tales como configuración y diagnósticos.
Los datos cíclicos representan informaciones cambiadas periódicamente entre el equipo de campo y el controlador. Por otro lado, los datos acíclicos son informaciones eventuales durante la configuración o el diagnostico de los equipos de campo.
El estrato físico y de acceso a la red DeviceNet se basa en la tecnología CAN (Controller Area Network) y los estratos superiores del protocolo CIP, lo cual define una arquitectura basada en objetos y conexiones entre ellos.
Una red DeviceNet puede tener hasta 64 dispositivos, cada cual de ellos ocupando un nudo de la red, con direcciones de 0 a 63. Cualquiera puede utilizarse, sin restricciones, sin embargo de evitarse el 63, pues se lo utiliza para puesta en marcha.
Un ejemplo de una red DeviceNet se ve en la figura 31.
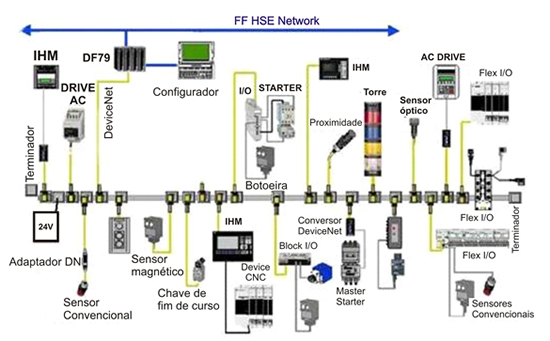
Figura 31 – Ejemplo de red DeviceNet
Soluciones confiables

