
ASI
Tutorial sobre la Tecnología AS-i
Introducción
En 1990, en Alemania, un consorcio de empresas exitosas crean un sistema de bus para redes de sensores y actuadores, denominado Actuator Sensor Interface (AS-Interface o en su forma abreviada AS-i).
Este sistema surgió para atender algunos requisitos definidos a partir de la experiencia de sus miembros fundadores y para abastecer el mercado cuyo nivel jerarquico esta orientado a bit. Desta forma, la red AS-i fue desarrollada para complementar los demás sistemas y hacer más simples y rápidas las conexiones entre sensores y actuadores asi como sus respectivos controladores.
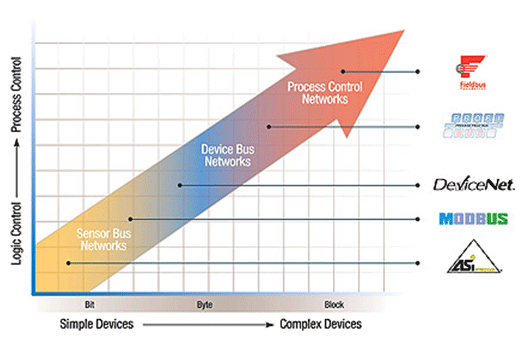
Figura 1.1: Escenario de la Tecnología - Fuente: ATAIDE, F.H. (2004)
Asociaciones AS-i
El AS-International Association o AS-Interface UK Expert Alliance é es un grupo de usuarios fundado en 1991 por empresas y usuarios de sistema AS-Interface. El objetivo del grupo fue hacer el AS-i un estándar a nivel mundial de campo orientado a bits de la automatización industrial, dentro de la categoría Sensor Bus.
El grupo proporciona a sus miembros la última información del mercado y tecnologia, incluyendo soporte de informaciones técnicas, certificación de productos, actividades, cursos, exposiciones y otros eventos. Para mayor información viste la página http://www.as-interface.net o http://www.as-interface.com.
A partir de 1999 la red AS-i fue estandarizada por la norma EN 50295/IEC 62026-2 y las asociaciones queregulam AS-International Association (2008) (www.as-interface.net) o AS-Interface UK Expert Alliance (www.as-interface.com) son abiertas a nuevos miembros interesados en el desarrollo de productos certificados.
Beneficios
Un sistema industrial formado por redes AS-i es considerado como el más económico e ideal para la comunicación entre actuadores y sensores. Los beneficios de la utilización de una red AS-i van desde ahorros de hardware hasta el comisionamiento de una red AS-i propiamente dicha.
La Figura 3.1 muestra algunos factores que deben ser considerados en la selección de una red industrial y los beneficios a cada uno de ellos cuando se utiliza redes AS-i.
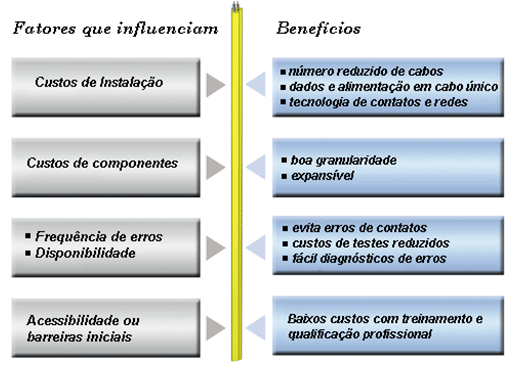
Figura 3.1: Análisis en la selección de la red industrial.
Fuente: AS-International Association (2008)
Bajo este enfoque, los beneficios pueden resumirse de la siguiente manera.
Simplicidad
Una rede AS-i es muy simple, require apenas solo un único cable para conectar los módulos de entradas y salidas de cualquier fabricante. Los usuarios de una red AS-i no necesitan conocimientos a fondo en sistema industriales o protocolos de comunicación. A diferencia de otras redes digitales, la red AS-i no necesita de terminadores y de archivos de descripción (DD´s) de equipos. La simplicidad es su principal importancia.
Desempeño
Los sistemas AS-i son eficientes y muy rápidos, haciendolos capaces de sustituir los sistemas grandes y con altos costos. Existen maestros AS-i, especialmente, desarrollados para comunicarse con los sistemas de control y proporcionan una integración perfecta entre las tecnologías existentes. Lo mejor de todo es que se logra de una forma simple y sencilla.
Flexibilidad
La expansibilidade es muy fácil de conseguir – solo tiene que conectar un módulo, direccionar y, luego conecte el cable de la red. Verifique si el LED de la fuente de alimentación está conectado y, luego, vea si está conectado al siguiente módulo. La red AS-i soporta cualquier topologia de cableado: estrella, bus, árbol, anillo o cualquier otra configuración con hasta 100 metros de cable. O bien, mediante la adición de repetidores es posible expandir el sistema hasta 300 metros. La red AS-i es de fácil instalación, ya que no necesita de terminadores en los puntos extremos.
Costo
Las redes AS-i tipicamente reducen el costo de cableado e instalación alrededor de un 50% en comparación con otras redes convencionales (Figura 3.2). El uso de un solo cable para la conexión con los equipos discretos reduce la necesidade de gabinete, conduíts y bandejas. Los ahorros generados en la utilización de la red pueden ser realmente significantes, ya que con el uso de pocos cables diminuye los costos de instalación,comisionamiento y, por ser una red simple, las horas de ingeniería.
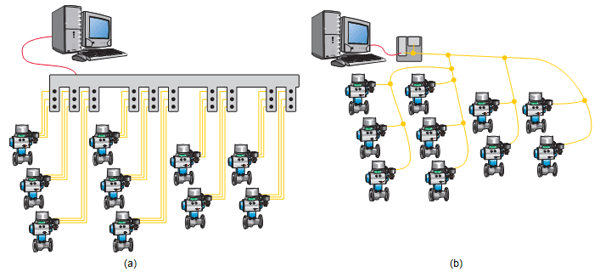
Figura 3.2: a) Sistemas convencionais; b) Rede AS-i.
Fuente: StoneL Corporation
El ahorro de costo con relación al hardware y, consecuentemente, la viabilidad de la red AS-i para determinadas aplicaciones puede ser vista a través de los items específicos representados en la Figura 3.3.
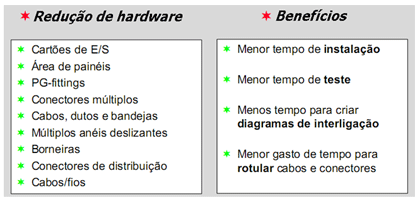
Figura 3.3: Viabilidad económica del sistema AS-i.
Fuente: AS-International Association (2008)
Versiones y Especificaciones
Especificación Original (1994, Versión 2.04)En las primeras redes, los módulos (esclavos) de interconexión de los elementos finales permitían la conexión de cuatro entradas digitales y cuatro salidas digitales, resultando en un total de 124 entradas y 124 salidas en una sola red (especificación AS-i 2.0 o AS-i 1). Sin embargo, en esta arquitectura, el número máximo de esclavos está limitado a 31.
Sus principales características están relacionadas con la sustituición automática de un módulo en la red y el tiempo de actualización es fácilmente calculado por la multiplicación del número de módulos de entrada y salida por el tiempo determinado de actualización de la red para cada nodo (aproximadamente 150 µs). Este cálculo simplificado no incluye la fase de gerenciamiento el cual puede ser despreciado para instalaciones típicas de la red.
Incluyendo Mejorias (1998, Versión 2.14)
Después de su introducción los usuarios rápidamente adoptarón la tecnologia e impulsaron la demanda de nuevos requerimientos con relación a la versión. De esta forma, fue publicada la especificación para la red AS-i 2.1 (o AS-i 2).
Las nuevas funcionalidades incluidas en la versión 2.1 son:
   |
|
|
|
|
|
|
Los chips para la versión 2.1 de la red AS-i son producidos por dos consórcios distintos: Siemens y Festodesarrollan en conjunto el chip SAP4.1, pin a pin compatible con el chip SAP4, y el consórcio de otros ocho miembros (Bosch, Hirschmann, ifm electronic, Leuze, Lumberg, Klockner Moeller, Pepperl+Fuchs y Schneider Electric) desarrollan el chip A2SI. Ambos chips proporcionan todas las funcionalidades de la versión 2.1.
Características Adicionales (2005/2007, Versión 3.0)
Hasta el año de 2005 el suceso mundial de la red AS-i, con aproximadamente 10 millones de nodos en operación, promovió la introducción de nuevos requerimientos para la red. Además, el creciente uso de Ethernet en protocolos industriales demando soluciones de bajo nivel que superan las deficiencias inherentes de Ethernet (por ejemplo: topologia limitada, grandes paquetes de datos, alto costo en el uso de ruteadores, entre otros). Esta especificación atiende a los usuarios de forma a definir nuevos perfiles para datos discretos y analógicos además de la introducción de un perfil de transmisión de datos serial (especificación 3.0 o AS-i 3).
- Nodos de entradas y salidas discretas soportando direccionamiento extendido (A/B) con 4 entradas y 4 salidas;
- Nodos de entradas y salidas discretas soportando direccionamiento extendido (A/B) con 8 entradas y 8 salidas;
- Canal analógico configurable (8, 12 o 16 bits);
- Canal de datos discreto con comunicación serial full-duplex.
Con estas nuevas características, la red AS-i se convierte en un socio ideal para cualquiera de otros protocolos industriales basados en la comunicación Ethernet. Gateways para EtherNet/IPTM, PROFINET, Modbus/TCP y otros están disponibles. Algunos especialistas del área de control dicen que en los próximos 10 años no habrá más soluciones intermediarias entre la red AS-i y Ethernet para nuevas instalaciones.
Características
El nombre Actuator Sensor Interface representa a su propio concepto. Es una solución simple y elegante para la integración de sensores y actuadores discretos en un sistema de control de procesos. Esta red posee una serie de características que son representadas de la siguiente manera.
- Compatibilidad: Sensores y Actuadores de diferentes fabricantes pueden ser conectados a una interfaz digital serial estandarizada;
- Control de acceso al medio: Sistema con solo un maestro y sondeo cíclico;
- Direccionamiento: Esclavos reciben un direccionamiento permanente del maestro o a través de hand-held;
- Topología: Sin restricciones (lineal, anillo, estrella o árbol);
- Medio de transferencia: Dos cables no-trenzados y sin blindaje para datos y energia (24 VDC), típicamente hasta 200 mA por esclavo, y hasta 8A por bus;
- Rápida instalación: Por medio de conectores auto-perforantes
- Longitud del cable: Máximo de 100 m o hasta 300 m con el uso de repetidores;
- Señales y alimentación: Están presentes en un mismo bus (24VDC);
- Número de esclavos: Hasta 62 esclavos por red (versión 2.1);
- Telegramas: Telegrama del maestro contenido el direccionamiento, respuesta directa del esclavo;
- Datos: 4 entradas y 4 salidas para cada esclavo y en el caso de más de 31 esclavos tiene, solo 3 salidas; (máximo de 248 entradas y salidas binarias por red).
- Carga útil: Transmite 4 bits/esclavo/mensaje. Todos los esclavos son llamados secuencialmente por el maestro y reciben 4 bits de datos. Cada esclavo responde inmediatamente con 4 bits de datos.
- Tiempo de ciclo: 10 ms para la versión 2.1;
- Detección de erros: Detección eficiente y retransmisión de telegramas incorrectos.
- Chip AS-Interface: 4 E/S configurables para datos, 4 parámetros de salidas y 2 salidas de control.
- Funciones del maestro: Barrido cíclico en todos los esclavos, transmisiones de datos para esclavos y para la unidad de control (PLC o PC). Inicialización de la red, identificación de los esclavos, diagnóstico de los esclavos y de datos transferidos. Además, los informes de errores en el controlador y la dirección de esclavos sustituídos.
- Válvulas: Son instaladas directamente en la aplicación, reduciendo las tuberias y aumentando la velocidad de respuesta de los actuadores;
- Bajo costo: Bajo costo de conexión por esclavo y elimina módulos de entradas y salidas en el PLC;
- Confiabilidad: Alto nível de confiabilidad operacional en ambientes industriales agresivos;
- Estandar abierto: Elaborado por diversos fabricantes, afiliados a la Asociación Internacional AS-i, cuyo protocolo de transmisión es normalizado.
- Opcional: Cable de alimentación para salidas y control de paro.
Conectividad
La red AS-i puede ser conectada al nivel de control principal de dos formas. La primera forma es la conexión directa (Figura 6.1 la izquierda). En este caso, el maestro es parte de un PLC o PC siendo ejecutado dentro de los tiempos de ciclos determinados por estos dispositivos. Un maestro AS-i puede ser construido por cualquier fabricante cuando se trata de un estándar abierto.
La segunda manera de conectarse es a través de un acoplador (gateway) entre una red de más alto nível y la red AS-i (Figura 6.1 la derecha). Existen otros acopladores para otras redes de campo, tales como: Profibus,Interbus, FIP, DeviceNet, CAN, etc.
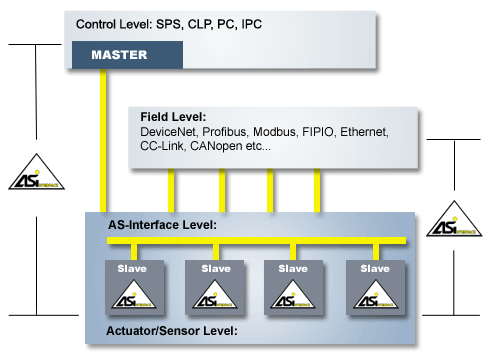
Figura 6.1 – Interconexión con otras redes digitales.
Fuente: v
El Sistema Interfaz Actuador-Sensor (AS-i)
El nombre Actuator Sensor Interface representa a su propio concepto. Aunque técnicamente, el "AS-i" es un bus, el término interfaz muestra que le proporciona una interfaz simple para el acceso a los sensores y actuadores en campo.
Las redes industriales AS-i fueron diseñadas para ser aplicadas en ambientes automatizados, sustituyendo las conexiones tradicionales de actuadores y sensores del tipo "switch" (on/off) por un bus único. Además de eso es posible conectar al bus sensores/actuadores que realizan una conversión analógico/digital o viceversa.
Tradicionalmente estas conexiones son echas por pares de hilos que conectan cada uno de los actuadores y sensores al controlador correspondiente, en general un Controlador Lógico Programable (PLC).
El sistema AS-i es configurado y controlado por un maestro, el cual programa a la interfaz entre un controlador y el sistema AS-i. Este intercambia información continuamente con todos los sensores y actuadores conectados al bus AS-i de forma predeterminada y cíclica.
La Figura 7.1 ilustra el sistema AS-i como un todo, mostrando sus principales componentes: cable, fuente de alimentación AS-i con su circuito de desacoplamiento, el maestro y el esclavo AS-i.
- Interfaz 1: entre el esclavo y los sensores y actuadores;
- Interfaz 2: entre los equipos (fuente de alimentación, maestro y esclavo) y el medio de transmisión;
- Interfaz 3: entre el maestro y el host, es decir, una entidad cualquiera que accesa a la red AS-i de un nivel superior.
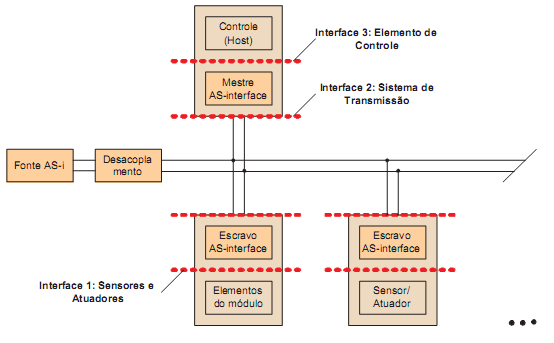
Figura 7.1: Componentes e interfaces.
Fuente: SANCHES, L.B. (2004)
7.1 Medio de Transmisión
La red AS-Interface conecta los dispositivos más simples de las soluciones de automatización. Un solo cable une actuadores y sensores con los niveles superiores de control. AS-Interface es un sistema de red estandarizado (EN 50295) y abierto, que interconecta de manera muy simple actuadores y sensores.
La conexión de los elementos puede ser realizada en estructura de árbol, estrella, lineal o en combinación con las anteriores. Dado que no existen conexiones convencionales y reducen el número de interconexionees en bornes y conectores, no solamente reduce costos y tiempo de montaje, también reduce errores.
En esta tecnologia la conexión es usando cables paralelos, cada contacto individual de un equipo es conectado separadamente por las terminales y bornes de sensores y actuadores. La red AS-i sustituye multiples cables, cajas de paso, canaletas, ductos de cables por un simple cable especialmente desarrollado para la red AS-i.
La red AS-i se caracteriza por ser solamente un par de hilos, que transmite los datos y alimenta a los sensores o actuadores en 24Vcc y la información del estado de los mismos. La configuración máxima de la red es de 62 esclavos que son accesados ciclicamente por un maestro en el nivel de control superior. El tiempo de reacción es pequeño, para todos los esclavos conectados, el tiempo de respuesta es de 10ms.
Anteriormente, los sensores y actuadores tenían que ser conectados al controlador a través de terminales, conectores y bloques de terminales. AS-i proporciona una reducción en los costos de instalación y mantenimiento. Ahora, un cable estandarizado con 2 hilos permite el intercambio de información y al mismo tiempo la alimentación de los equipos. Los esclavos son conectados directamente en el bus sin la necesidad de interconexión adicional.
Un cable flexible de dos vias fue diseñado como estándar para la rede AS-i. Existe otro cable de forma redonda que se usa solamente cuando es especificado por el fabricante.
7.1.1 Cable Flexible Estándar
Este cable flexible de alta tensión cumple con las normas CENELEC o DIN VDE 0281, designado por H05VV-F 2X1.5 es económico y fácil de adquirir.
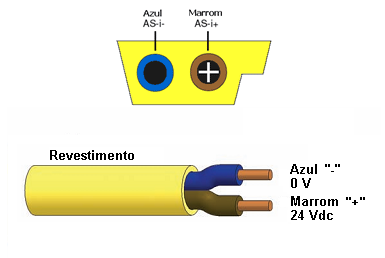
Figura 7.2: Cables estándares del bus AS-i
Fuente: AS-International Association (2008) y Turck Networks.
El cable AS-i, no blindado, no trenzado, tiene dos conductores paralelos y transmite tanto datos como la alimentación de los esclavos. Su cubierta externa es de color amarillo y se caracteriza por su forma geométrica, y fue diseñada para evitar la conexión con polaridad inversa (Figura 7.3).
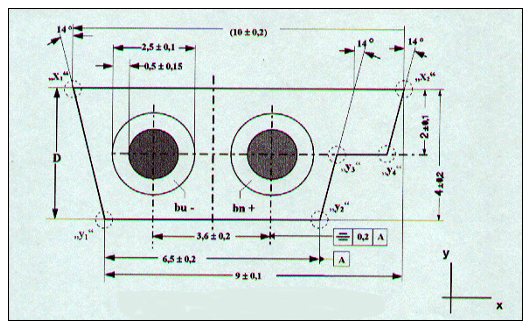
Figura 7.3: Vista del corte frontal del cable AS-i
Fuente: LIAN, S.C.P. (2003).
El cable no es necesario de cortarlo o "pelarlo" para ser conectado. Esto en general es la causa de caídas de tensión indispensables y son fuentes potenciales de mal contacto. Por otro lado, tiene una forma de deinstalación bastante interesante, que contribuye en el ahorro de costos en sus implementaciones.
El principio es simple: el contacto con los conductores internos es realizado por medio de láminas conductoras, que penetran los aislamientos plásticos para llegar a los hilos de cobre internos.
El revestimento externo tiene una propiedad de "sello o protección", es decir, se cierra el cable en caso de que las láminas fueran desconectadas sin ver el corte realizado longitudinalmente. Es evidente que losrevestimentos permanecen perforados, mas no presentan riesgo de corto-circuito debido a esta técnica. Las Figuras 7.4a y 7.4b ilustran el concepto.
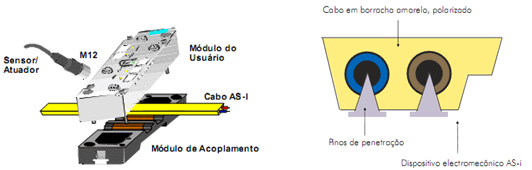
Figura 7.4: a) Acoplamiento del módulo al bus; b) Pines de perforación
Fuente: SILVA, W.A.C.M (2008) e AS-International Association (2008) (2008).
Además de la alimentación disponible para los esclavos a través del cable amarillo, que se convirtió en una especie de marca registrada del sistema AS-i, y que atiende casi todos los casos prácticos, puede ser necesaria alimentación complementaria para algunos esclavos, principalmente actuadores más potentes. En este caso un cable negro adicional es utilizado, con las mismas características del primero, más dedicado exclusivamente a la alimentación. Este también usa la técnica de penetración descrita anteriormente y es adecuado para suministros hasta de 30 V.
Hay dos consideraciones eléctricas relevantes en la selección de un medio de transmisión adecuado: la resistencia CC para alimentación y las características de transmisión en un rango de frecuencia usada en la comunicación. Por lo menos 2A de corriente deben ser transmitidos de alimentación a los dos esclavos. Dentro de estas exigencias, otros cables pueden ser usados, permitidos para proyectos de casos específicos, como por ejemplo, conducción de corrientes mayores o la necesidad de cables móviles.
Además de estas dos clases de cables, existe una versión de color rojo, de hasta 230V AC.
7.1.2 Cable Circular
Este cable fue diseñado especificamente para AS-i, con características eléctricas bastante similares, pero con una forma de instalación específica. Este cable puede estar o no estar blindado, pero preferentemente los cables no blindados son utilizados con las siguientes características (en la frecuencia de 167 kHz).
- R´: < 90 mΩ/m
- C´: < 80 pF/m
- Z : 70 Ω to 140 Ω
- G´: ≤ 5 µS/m
Es recomendado un cable con corte de sección transversal de 2 x 1.5 mm2.
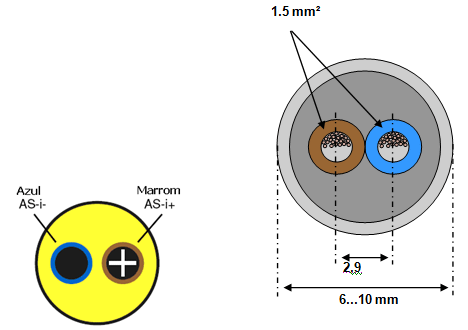
Figura 7.5: Cables circulares sin blindaje.
Fuente: AS-Interface Association
7.1.3 Conexioes en la red AS-i
Cualquiera de las conexiones en la red AS-i que no sean las tecnologias convencionales debe respetar los siguientes requerimientos.
- Resistencia de contacto no máximo de 6 mΩ;
- Corriente mínima permitida de 1,5 Inom (mínimo de 3A para red AS-i en general);
- Rango de tensión de contacto de 10V a 70 V d.c;
- Choques y vibraciones de acuerdo con el item 7.4 de IEC 60947-5-2;
- Fuerza de ruptura de acuerdo con el anexo E de la norma IEC 60947-5-2;
Si una abrazadera o terminales de conexiones de tornillos se utiliza, su espesor debe ser como mínimo 2 x 2 x 1.5 mm2. Si los conectores utilizan el tipo D.2 de acuerdo con el anexo D de la norma IEC 60947-5-2 es lo recomendado.
7.1.4 Longitud del cable
La longitud máxima del cable de un bus AS-i es de 100 m sin el uso de repetidores. En caso de utilizar los repetidores la longitud permitida como máximo es de 300 m.
La longitud del bus AS-i puede ser calculado por el aumento del tamaño del cable del bus más 2x el tamaño de los acessorios conectados a la red. Ejemplo: 50 metros de cable amarillo y 5 tap-offs con 2 m de cable en los de una red del tamaño igual a: 50 + 2 x 5 x = 70 m.
En las Figuras 7.6 y 7.7 se representan las soluciones para conexiones extensas y repetidores a fin de aumentar la longitud del bus AS-i.
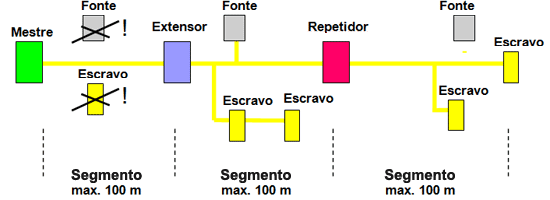
Figura 7.6: Solución con un extensor y un repetidor
Fuente: AS-Interface Association.
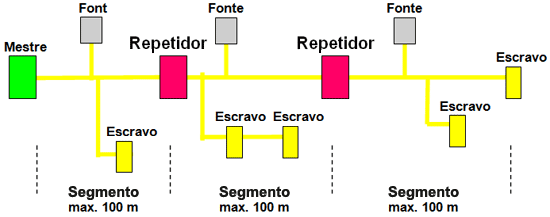
Figura 7.7: Solución con dos repetidores
Fuente: AS-International Association (2008).
7.2 Fuente de Alimentación
Fuente de Alimentación
7.2.1 Fuente de Alimentación
La unidad de fuente de alimentación trabaja con una tensión de 29,5V a 31,6V DC y en condiciones normales de operación, suministra una corriente de 0A a 8A. La fuente suministra alimentación a los esclavos y parcialmente al maestro a través de dos hilos, y el mismo cable para transmisión de datos AS-i, y se puede conectar en la red en cualquier punto. En las líneas largas, las caídas de tensión deben ser consideradas y generalmente no debe ser mayor de 3V. La fuente posee internamente un circuito de protección de sobrecarga para limitar la corriente.
7.2.2 Balanceamiento
La fuente también es responsable de balancear a la red AS-i. AS-i es operado como um sistema simétrico, no aterrizado. Para imunidad a los ruídos el cable AS-i debe ser instalado de forma simétrica lo mas posible. Esto es posible a través del circuito de balanceamiento mostrado en la Figura 7.8. La conexión de blindaje debe ser conectada en un punto apropiado de la máquina o sistema. También ese punto debe ser conectado a tierra (GND) del sistema.
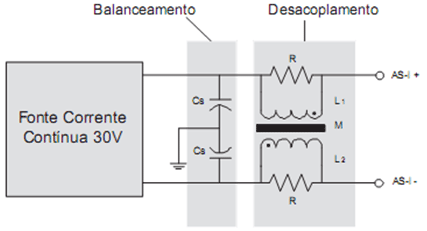
Figura 7.8: Diagrama Esquemático Simplificado de la fuente de alimentación AS-i
Fuente: SANCHES, L.B. (2004)
7.2.3 Desacoplamiento de los Datos
La tercera función de la fuente de alimentación es proveer el desacoplamiento de los datos. La red de desacoplamiento, que en general se encuentra en el mismo módulo de la fuente de alimentación, consiste de dos inductores de 50µH cada uno (L1 y L2) y dos resistores en paralelo de 39Ω cada uno. Los inductores realizan una operación de diferenciación sobre los pulsos de tensión para convertir los pulsos de corriente generados por los transmisores conectados a la red. Al mismo tiempo, previenen um corto circuito en el cable. El acoplamiento entre los inductores debe ser lo mas cercano posible de 1, lo que equivale a decir que la inductancia mútua debe ser de aproximadamente de 200µH.
7.2.4 Seguridad
La cuarta función es una consideración de seguridad. El sistema AS-i fue diseñado como un sistema para tensiones pequeñas con aislamiento seguro (Protective Extra Low Voltage). Esto significa que de acuerdo con los estandares IEC relevantes, "aislante seguro" es requerida de la fuente entre la red de alimentación y la red AS-i.
7.3 Redundancia
Esta característica no es muy común en las redes AS-i, ya que es un sistema donde predomina la comunicación discreta y también debido a su robusto, determininismo y simplicidad. La redundancia puede ser a nivel de maestro y fuentes de alimentación. Hasta el momento no existe redundancia de cableado a nivel de esclavos.
Se puede tener en una red un maestro redundante. Este maestro permanece en modo de monitoreo y al presentarse una falla o falta de comunicación del maestro activo, tomará el control de la red. En relación a la fuente de alimentación, este también se puede hacer usando un “Power Extender”, de esta forma las dos fuentes estarán conectadas en modo redundante.
7.4 Sensores y Atuadores (Interface 1)
7.4.1 O El Esclavo AS-i
El esclavo AS-i, como se ve en la Figura 7.1 hace una conexión entre el sistema de transmisión y una interface 1, en la cual están conectados los sensores y actuadores. El esclavo los alimenta y genera la comunicación con el maestro. Desde el inicio del desarrollo de la especificación de AS-i estaba claro que el esclavo debería ser pequeño y compacto para poder ser integrado directamente a los sensores y actuadores. Esto se puede lograr mediante el uso de circuitos integrados, dando origen al famoso chip AS-i.
El chip esclavo AS-i permite que los sensores, actuadores o módulos puedan ser conectados al bus AS-i como un dispositivo esclavo, reconociendo los comandos de salida del maestro y enviando información de respuesta. Una gran variedad de sensores y actuadores utilizados últimamente en la automatización, permiten un bajo costo por conexión en dispositivos esclavos AS-i. En el caso de los dispositivos analógicos, los datos de masde 4 bits de información útil por ciclo. En este caso, los datos son divididos y enviados en varios ciclos. Existen dos maneras posibles de usar un chip esclavo AS-i:
El chip AS-i puede ser incorporado en sensores o actuadores (Figura 7.9), de esta forma los elementos están integrados con AS-i y todos los bits de datos y parámetros están disponibles al dispositivo (sensor o actuador).
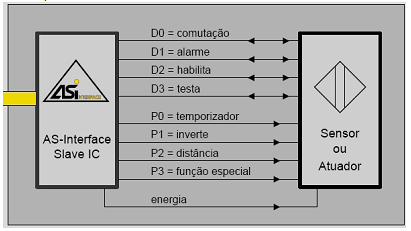
Figura7.9: Sensor o actuador con AS-i incorporado.
Fuente: AS-International Association (2008).
Otra forma es utilizando un chip esclavo AS-i incorporado en los módulos en la cual se pueden conectar sensores y actuadores convencionales. En la Figura 7.10 se representa un módulo con dos entradas para sensores y dos salidas para actuadores binarios.
Independientemente de la forma en que fue implementado el esclavo, tendrá una arquitetura como se muestra en la figura 7.11, en que las conexiones con la interfaz 1 pueden ser física o lógica y con la interfaz 2 son físicas.
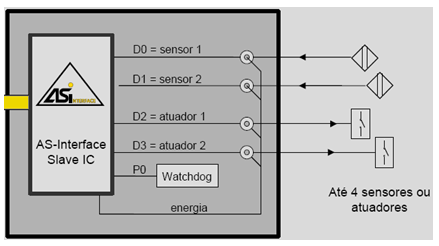
Figura7.10: Módulo 2E/2S para sensores/actuadores convencionales.
Fuente: AS-Interface Association.
En la ruta de alimentación las señales de datos son separadas del componente de alimentación por medio de una inductancia. Para implementarla en un CI, esta indutancia es realizada electrónicamente, y garantiza que el esclavo mantenga una resistencia suficientemente alta en la banda de frecuenncia de los datos de comunicación. La tensión de alimentación es suministrada en la terminal Vout.
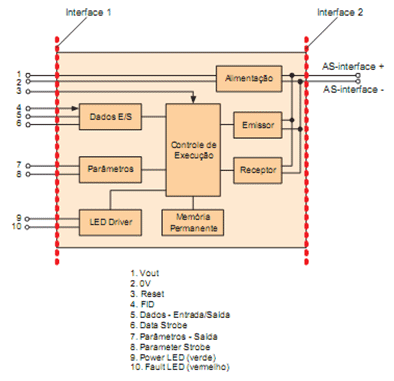
Figura 7.11: Arquitectura de un esclavo AS-i
Fuente: SANCHES, L.B. (2004).
En el receptor de los pulsos de tensión detectados en el cable AS-i son filtrados, digitalizados y registrados. Al mismo tiempo la señal recibida es sometida a pruebas de detección de errores, para garantizar que los ruídosno hayan corrompido los requerimientos del maestro.
En el emisor la información del registrador de envio es codificada y enviada por el bus como una secuencia de pulsos de corriente de acuerdo con la modulación APM.
Finalmente el control de ejecución decodifica las peticiones del maestro, verifica si hay posibles errores, realiza el comando codificado por ellos y si fuera el caso, produce una respuesta para enviarla. El control de la ejecución (o de secuencia) también posee un área de memoria no volátil.
El esclavo tiene los siguientes registros y flags:
- Registrador de Dirección: Este registrador de 5 bits contiene una dirección actual del esclavo. Si la dirección de una petición del maestro es igual a la dirección contenida en el, entonces el esclavo responderá a la solicitud. Después de un reset el registrodor se carga con un valor de dirección contenida en la memoria no volátil del esclavo. Su contenido puede ser cambiado por el maestro a través de las peticiones Eliminar dirección y Asignar dirección.
- Registradores de Identificación: Estos registradores contienen la configuración de entradas y salidas (configuración de I/O) y los códigos de identificación (código ID) del esclavo. Con excepción del registrador Código 1 ID, que puede ser el valor alterado por el maestro, los otros son permanentes y grabados durante su fabricación.
- Registrador de datos de salida: El registrador Datos de Salida es de cuatro bits y tiene los datos de la última solicitud de datos del maestro (data request) que fue recibida sin errores por el esclavo. Los bits que están relacionados a una salida de acuerdo con la configuración de E/S representan el valor de esta salida, en cuanto a los demás son ignorados. Despues de un reset el registrador es cargado con el valor hexadecimal F por default.
- Registrador de Parámetros: Este registrador de 4 bits tiene el último valor de los parámetros recibidos de una solicitud de parámetros válida. Los bits corresponden a los puertos de salida de los parámetros.
- Registrador de recepción: Este registrador contiene la última solicitud del maestro para procesamiento en el control de ejecución.
- Registrador de envio: Este registrador de 5 bits tiene la respuesta del esclavo la cual puede ser enviada.
- Registrador de Estado: El registrador de estado contiene 3 bits para indicar determinadas condiciones de estado del esclavo:
- Flag S0: Se activa durante el proceso de almacenamiento de dirección del esclavo.
- Flag S1: Se activa si la entrada FID reporta un error de periféricos.
- Flag S3: Se activa si ocurre un error durante la lectura de la dirección del esclavo en la memoria no volátil
- Flag de Sincronización: Si el esclavo recibe correctamente una solicitud del maestro, decodifica el enviode una respuesta, el flag de sincronización es activado. En el estado sincronizado la pausa del maestro es monitoreada después de una petición por un poco de tiempo, y la respuesta del esclavo inicia después de los dos tiempos de bit.
- Flag de Intercambio de Datos bloqueada: Este flag es activado por un reset y se desactiva al recibir una solicitud sin errores de parámetros. Este mecanismo impide que las solicitudes de datos (datos solicitados) sean aceptadas sin los parámetros de puertos, siempre y cuando no se hayan cargado con parámetros nominales. Este comportamiento es necesario para evitar inconsistencias entre el esclavo y el maestro. Puede ocurrrir, por ejemplo, que un esclavo pueda ser reiniciado (reset) por una falla de alimentación momentánea, sin que el maestro tome conocimiento. Esto pasaría con los parámetros que fueran reiniciados, en cuanto a la imagen que el maestro mantiene de ellos permanece igual. El esclavo puede responder entonces de forma diferente a la esperada por el maestro, causando problemas no deseados. Por esta razón un paquete de datos solo puede ser realizada después de una solicitud de parámetros por parte del maestro.
7.4.2 La Interfaz 1
Como se indica en la Figura 7.11 la interfaz 1 del esclavo posee 4 puertos de datos que dependiendo de laconfiguración de E/S pueden ser usadas como entradas, salidas o como puertos bidireccionales. También cuenta con una salida data strobe, que avisa cuando los datos de salida están presentes y cuando los datos de entrada son esperados.
Para actuadores esclavos es recomendado que el monitor de timeout, conocido por watchdog, y que el circuito integrado del esclavo, sea activado. Si dentro de poco de tiempo especificado no es recibida una nueva solicitud correcta de datos ("data request") en la dirección del esclavo, el actuador puede utilizar la señal de watchdog para ir a un estado seguro.
Este mecanismo permite que una serie de posibles errores sea cubierta, como falla de hardware del maestro, interferencias en el cable de transmisión o pérdida de dirección del esclavo. Cuando sea necesario, un sistema AS-i puede ser más seguro. Normalmente, un valor entre 40 y 100ms es especificado como período de timeout.
Ademas de los puertos de datos, que permiten el paquete de datos gira con el maestro, están presentes puertos para paquetes de parámetros aciclicos entre los maestros y el esclavo. Hay también, nuevamente una salida parameter strobe para indicar que recibió un nuevo mensaje de parámetros.
La entrada "FID" es usada para señalar las fallas periféricas. Si la electrónica del esclavo detecta un error, esta entrada puede ser utilizada para señalar el evento localmente, a través de LEDs y reportarlo al maestro a través del estado de bits. El maestro puede establecer al esclavo en una lista de esclavos con errores periféricos, y reportarla a su vez a los niveles superiores de control.
Finalmente, una salida de corriente contínua, que generalmente esta en el rango de tolerancia de 24V +10/-15% proporciona alimentación a los sensores/actuadores.
7.5 Sistemas de Transmisión (Interfaz 2)
La interfaz 2 incluye las especificaciones necesarias para el buen manejo de los datos entre los elementos conectados en el bus AS-i. Este define la forma de acceso al medio físico, el intercambio de datos sobre el nivel eléctrico y el tratamiento de algunos errores de comunicación, así como las solicitudes de tiempo en las transacciones.
7.5.1 Estructuras de la red
La topología de red del sistema AS-i se deja a elección del usuario, lo que simplifica su proyecto. La restricción no se observa si el limite máximo de 100m de la longitud del cable. Es importante notar también que no son necesarias las terminales de impedancias, lo que también simplifica la instalación. Las estruturas en árbol, lineal, estrella y hasta en anillo son permitidas (Figura 7.12). En caso de que las conexiones sean de longitudes mayores, pueden ser usados los repetidores, ampliando el alcance de la red, siempre y cuando se respete los límites de 62 esclavos y un maestro.
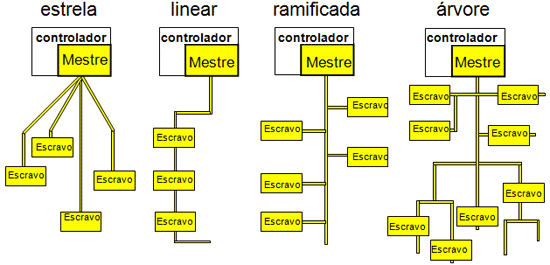
Figura 7.12: Topologia física de la red.
Fuente: AS-International Association (2008)
7.5.2 Modulación
La selección de una modulación adecuada para AS-i deberia atender un conjunto de requerimientos bastante exigentes, lo que llevo al desarrollo de un nuevo procedimiento de modulación, conocido como Modulación de Pulsos Alternados (APM - Alternating Pulse Modulation). Estos requerimientos incluyen:
- La señal del mensaje superpuesta a la tensión de alimentación debe ser precisa y libre de componente de corriente contínua.
- El transmisor del esclavo, y cuando sea posible, el del maestro, debe ser capaz de generar la señal de una manera simple, que ocupe poco espacio y bajo costo.
- Desde que el cable AS-i tiene una impedancia que aumenta con la frecuencia, la señal de los datos debe tener una banda relativamente estrecha.
- Los niveles altos de radiación de ruido también son inaceptables.
La modulación APM es un procedimiento para la transmisión serial en banda base como se muestra en la Figura 7.13. La secuencia de bits es inicialmente codificada de manera que un cambio de fase ocurre siempre que la señal se modifica (código Manchester). El resultado es una corriente de envio que en conjunto con un solo inductor en el sistema usa la diferenciación para generar la señal de tensión deseada en los conductores.
Cada aumento en la corriente de envio resulta en un pulso de tensión negativa, y da como resultado un pulso positivo. De esta forma es muy simple generar señales en los esclavos, como tensión superior a la tensión de alimentación. Esto significa que los indutores pueden ser eliminados en los esclavos, lo que mantiene la electrónica integrada pequeña y barata. Del lado del receptor estas señales de tensión son detectadas en la línea y convertirlos nuevamente en la secuencia de bits enviada. El receptor se sincroniza con la detección del primer pulso negativo, que es interpretado como un start bit. Si los pulsos de tensión se aproximan a los pulsos de tipo sen2, entonces los requerimientos para limite de baja frecuencia y baja emisión de ruidos son atendidos al mismo tiempo. Esto se consigue por medio de una forma adecuada en los pulsos de corriente enviada o que el generado como la integral de un pulso sen2. Usando esta modulación y las topologías permitidas en tiempos de bit de 6µs son obtenidos. Esto permite una velocidad de transmisión 167kBit/s.
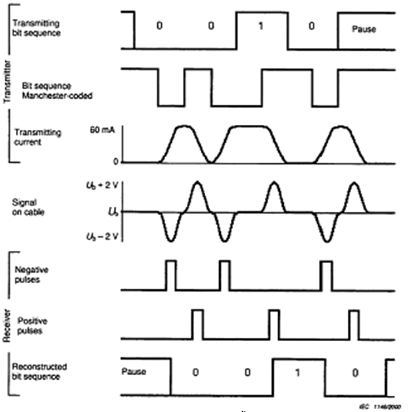
Figura 7.13: Modulación APM.
Fuente: SANCHES, L.B. (2004).
Como los cables no tienen terminadores, los pulsos de los mensajes tienen una gran variación de amplitud. Al ser capaz de afrontar el problema causado principalmente por reflexiones al final del cable, que atienden lasfrecuancias mayores, AS-i representa un sistema extremamente robusto.
7.5.3 Acesso al Medio
Desde que AS-i fue diseñado para sustituir las conexiones punto a punto tipo estrella, un procedimiento de acceso al medio que reproduzca esta topología y que garantize un tiempo de respuesta definido fue seleccionado – el acceso del tipo maestro-esclavo con sondeo cíclico. El maestro envía un telegrama que es recibido por el esclavo en una dirección particular y el esclavo con esta dirección responde dentro del tiempo previsto. Esta operación es designada como una transacción. El sistema de transmisión permite la conexión al bus de un maestro y de hasta 62 esclavos.
El procedimiento elejido permite la construcción de esclavos mucho mas simples y, por lo tanto, de costo efectivo, en cuanto a flexibilidad e integridad. En el caso de las pequeñas perturbaciones en la red, el maestro puede, por ejemplo, repetir telegramas a la dirección del cual no recibe respuesta, o respuesta invalida. Los mensajes AS-i, por lo tanto, son de dos tipos: las que son enviadas por el maestro y las respuestas del esclavo. La Figura 7.14 ilustra una transacción y el tiempo usado. Esta constituída de:
- una solicitud del maestro,
- una pausa del maestro,
- una respuesta del esclavo y
- una pausa del esclavo.
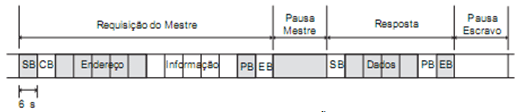
Figura 7.14: Una transacción AS-i.
Fuente: SANCHES, L.B. (2004).
La solicitud del maestro se extiende siempre a 14 tiempos de bit, y la respuesta del esclavo a 7. Un tiempo de bit corresponde a un intervalo de tiempo uniforme de 6µs. La pausa del maestro debe estar en un intervalo de un minimo de 2 tiempos de bit y un máximo de 10 tiempos de bit. Si el esclavo está sincronizado, puede comenzar a transmitir su respuesta lo mas pronto después de mas de 2 tiempos de bit, en caso contrario necesitara mas de dos tiempos, hasta que se pueda estar monitorendo la pausa del maestro en este periodo para cualquier información adicional antes de que pueda aceptarla como válida. Sin embargo si el maestro no ha recibido respuesta dentro de un máximo de 10 tiempos de bit, puede asumir que no habrá respuesta e iniciar la transacción siguiente. La pausa entre el final de una respuesta del esclavo es la siguiente solicitud del maestro y debe estar entre 1,5 y 2 tiempos de bit.
Una solicitud del maestro consiste de:
- Start Bit (SB). Identifica el inicio de una solicitud del maestro en el bus. Su valor siempre es "0".
- Control Bit (CB). Identifica el tipo de solicitud: "0" para solicitudes de datos, parámetros o atribuciones de dirección y "1" para los de comando.
- Address (A4..A0). Dirección del esclavo solicitado.
- Información (I4..I0). Estos 5 bits componen, la solicitud realizada, los datos enviados al esclavo.
- Bit de Paridad (PB). El número de bits con valor "1" indicada que una solicitud se esta ejecutando y el ultimo bit sebe ser par.
- End Bit (EB). Identifica el final de una solicitud del maestro. Siempre tiene el valor "1".
Una respuesta de cualquier esclavo consiste de:
- Start Bit (SB). Identifica el inicio de una respuesta del esclavo. Siempre tiene el valor "0".
- Información (I3..I0). Estos bits componen la información propiamente enviada al maestro.
- Bit de Paridad (PB). Así como una solicitud, también una respuesta debe tener paridad par.
- End Bit (EB). Siempre de valor "1", asignada al final de una respuesta del esclavo.
La versión 2.1 AS-i (1998) tiene la posibilidad de direccionar el doble de escalvos. Con ella, hasta 62 esclavos pueden ser conectados. Para que esto fuera posible, un bit de campo de información es utilizado para seleccionar un bit llamado "select bit", o, bit de selección. De esta forma, los esclavos conectados al bus fueron divididos en dos grupos de 31 esclavos como máximo, cada grupo: A y B. Además, un esclavo paso a tener una dirección y recibió distinción tipo - A o B. Esta modificación fue intoducida para no perder la compatiblidad de esclavos de la versión anterior con los maestros de la nueva versión.
Los esclavos de la version anterior pueden ser direccionados normalmente, pero ocupan dos direcciones de cada uno. Para ellos no hay una distinción entre esclavo "A" o "B", y no reconocen el bit de selección como un bit normal de información. Los maestros conforme a la nueva versión tienen los medios de identificar el tipo de esclavo y enviar las solicitudes propiamente. Esto será visto mas adelante.
7.5.4 Tratamiento de Errores
El reconocimiento confiable de errores es de gran importancia para la comunicación sin fallas a través de AS-i, que generalmente no es blindado. Debido a que los telegramas AS-i en las transacciones serian bastante cortos, la detección de errores es diferente de la aplicada en otras redes de campo. La solicitud del maestro tiene solo 11 bits de datos que deben controlar, y la respuesta del esclavo 4 bits. Aumentar bits para verificación de errores en los mensajes disminuiría la velocidad de transmisión. Al contario, AS-i hace uso del tamaño conocido de los mensajes, dos estándares de bits especificados son de la modulación de pulsos alternados para disinguir los siguientes errores:
- Error de Inicio de Bit;
- Error de alternancia;
- Error de pausa;
- Error de Información;
- Error de paridad;
- Error de Fin de Bit y;
- Error de tamaño del telegrama.
Cada solicitud del maestro y cada respuesta del esclavo es sometida a una verificación de estos 7 tipos de errores. Si alguno de ellos es detectado, la solicitud (o respuesta) es considerada inválida.
7.5.5 Señales Analógicas de E/S
AS-i soporta transmisión de señales analógicas. Para esto el valor analógico digitalizado será separado en varias partes y transmitido, a través de varios ciclos. Para una señal de entrada analógica de 12 bits de datos, 6 ciclos serán necesarios, constituyendo un tiempo total de transmisión de 30 ms (en la versión 2.1 de la especificación AS-i). Un circuito de conversión A/D debe ser parte integral del dispositivo esclavo que tiene E/S analógicas.
En este circuito será realizado no solo la conversión de señales, también debe ser capaz de congelar el valor convertido hasta que todos los bits sean totalmente transmitidos, y solo entonces estará listo para una nueva muestra de señal analógica.
AS-International define un estándar para la transmisión de valores de señales analógicas (definido en el apartado S-17 de la especificación AS-Inteface). Para facilitar el uso practico, algunos PLC´s ya ofrecen bloques funcionales para aplicaciones con valores de señales analógicas.
Para asegurar la consistencia de los datos entre el maestro y el esclavo, un bit handshake fue definido en esteperfil, el cual es invertido por el esclavo y retorna. Asimismo, el maestro puede verificar que tenga una respuesta del esclavo y el esclavo puede verificar si el maestro quiere la repetición de la última solicitud o si quiere la siguiente parte de los datos. Por otro lado, esto reduce la carga útil en cada frame de 3 bits por ciclo. Además asegura la transmisión correcta de los mismos datos con perturbaciones. Para entradas analógicas, el maestro solicita y el esclavo responde; para salidas analógicas el esclavo solicita y el maestro responde.
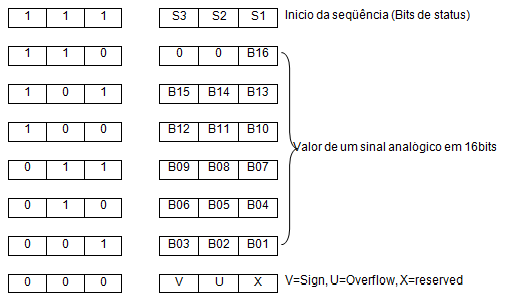
Figura 7.15: Secuencia de transmisión de un valor analógico..
Fonte: ATAIDE, F.H. (2004).
7.6 O El Maestro AS-i (Interfaz 3)
El maestro AS-i hace la conexión entre un controlador o un sistema de bus de campo (Host) y los sensores y actuadores de la red AS-i. Se genera el tráfico de mensajes en el bus de forma independiente, de modo que el Host y los sensores y actuadores son vistos como una arquitectura tradicional. Además de esto, el maestro tiene funciones adicionales de configuración y diagnostico de la red AS-i.
La especificación de AS-i divide al maestro en tres capas, que van desde el cable de transmisión hasta la interfaz 3 (Figura 7.16).
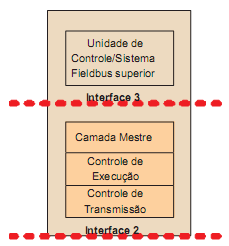
Figura 7.16: Estructura en capas del maestro AS-i
Fuente: SANCHES, L.B. (2004)
A transmisión física de los requerimientos del maestro es especificada por la interfaz 1 y tiene básicamente las mismas características del esclavo.
La capa lógica mas baja es la capa de transmisión, que es responsable de la transmisión y recepción de los telegramas individuales. La repetición automática de telegramas cuando una respuesta del esclavo falla es posible, garantizando integridad a sus capas superiores.
El control de secuencia o control de ejecución, esta por encima de la capa de transmisión y envia los requerimientos de transmison de datos a ella. La función de esta capa es controlar la secuencia en que los telegramas son enviados, y también procesan las funciones llamadas por la capa superior, generando los telegramas correctamente y en la secuencia requerida.
La capa mas alta es la capa maestra, y realiza la interfaz con el Host.
7.6.1 Requerimientos del Maestro
El maestro AS-i realiza la función de interconectar la interfaces 2 y 3 a través de mensajes enviados a los esclavos, uno a uno. Aquí presentaremos las posibles peticiones – que son pocas – que el maestro puede realizar a un determinado esclavo, a través de la interfaz 2, asi como el comportamiento del esclavo ante las peticiones, es decir, sus respuestas.
La Figura 7.17 presenta todas las posibles peticiones que un maestro puede pedir a un esclavo, a partir de la especificación 2.1 AS-i, el cual admite el direccionamiento extendido. Se puede observar en las solicitudes la presencia de un select bit. Este bit toma el lugar de un bit anteriormente utilizado para el intercambio de datos comunes. Al agregar un nuevo bit es posible el direccionamiento doble de esclavos iniciando: 62. Además de tener una dirección entre 0 y 31 los esclavos también tienen una de tipo: A o B, que es definido por el bit de selección (select bit).
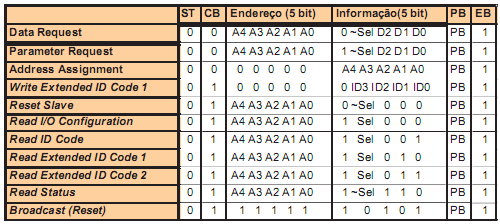
Figura 7.17: Requerimientos de un maestro a partir de la especificación 2.1
Fuente: BECKER et al. (2002)
Estos requerimientos son analizados uno a uno acontinuacion:
Leer configuración de I/O: A través de este requerimiento el maestro recibe como respuesta la configuración de entradas y salidas (IO configuración) de un esclavo. Además se identifica el código de ID del esclavo (ID code) con la configuración de IO solamente en un tipo de esclavo. La configuración de IO se refiere al comportamiento de los puertos de datos de la interfaz 1 del esclavo, y es definida como se muestra en la Figura 7.18.
En esta definición, IN significa una entrada de proceso, OUT una salida, IO un comportamiento bidireccional del puerto y TRI indica una salida de alta impedancia sin función. Este último caso es admitido cuando durante unreset un error de lectura de la memoria del esclavo no permite que una identificación sin ambigüedad sea definida.
Siempre que una salida esta definida (OUT), esto significa que el bit de información correspondiente en la respuesta del esclavo es indefinido. De la misma forma, un bot de información de una petición del meastroreferente a un puerto de entrada (IN) es indefinido, lo mismo cuando el bit es alto.
La configuración de I/O permite que la información innecesaria sea ocultada. Además junto con el código ID constituyen un perfil del esclavo. Esta es definida por el fabricante, tiene siempre 4 bits, y no puede ser modificada por el usuario.
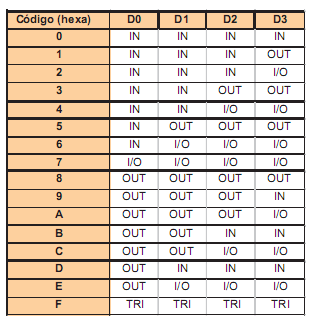
Figura 7.18: Códigos de configuración de entrada y salida
Fuente: BECKER et al. (2002)
Leer Código ID: El código ID de los esclavos de acuerdo a la version 2.1 de la especificación tiene el mismo código de ID original, leído por el maestro a través de la petición "Read ID Code – Leer Código ID", dos otros códigos - "Extended ID Code 1" y "Extended ID Code 2". En conjunto ellos sirven para identificar esclavos diferentes. Los esclavos de acuerdo a la nueva especificación, por ejemplo, tienen el código ID "A", en hexadecimal, en cuanto un código ID "B" indica un esclavo "safety at work – seguridad en el trabajo". Todos los esclavos con código ID igual a "A" tienen también los otros dos códigos de ID.
Leer Código 1 Extendido: Est es semejante a la anterior, es usada para leer el código 1 extendido del esclavo cuando existe. Este código es diferente al original, puede ser modificado por el usuario.
Leer Código 2 Extendido: Este código extende las posibilidades de configuración de los esclavos, y es como el código ID original no puede ser modificado por el usuario, siendo definido de forma definitiva por el fabricante.
El perfil de un esclavo, constituido por el conjunto de los códigos ID y de la configuración de I/O, tiene la definición del comportamiento de los parámetros, puertos de datos y otras características adicionales del esclavo.
Solicitud de Datos: Esta es la más frecuente en AS-i, y es la que permite atribuir valores a las salidas de datos del esclavo en la interfaz 1, y obtiene como respuesta el valor de las entradas. Como se mencionoanteriormente, el comportamiento de los puertos es definido por la configuración de I/O. Los puertos de datos pueden ser usados de diferentes formas, no sólo como entradas y salidas binarias de variables de proceso. Pueden ser usadas también para configuraciones adicionales, y tambein como representación digitalizada de variables analógicas de proceso.
Solicitud de Parámetros: Esta es usada por el maestro para enviar un estándar de bits a los puetos de salida de parámetros en la interfaz 1 de un esclavo, los cuales pueden controlar determinados comportamientos en el esclavo. El ultimo valor enviado es mantenido en el esclavo hasta que uno mas reciente sea recibido o que ocurra un reset. Para un esclavo estándar hay 4 bits de parámetros, para los esclavos con direccionamiento extendido solo 3, ya que uno de ellos es usado como bit de selección. Esta no puede ser realizada a un esclavo con dirección 0, pues seria interpretada de manera diferente.
Asiganar Dirección: Este comando permite atribuir una nueva dirección permanente a un esclavo como dirección 0. El esclavo envia una respuesta de reconocimiento e inicia el proceso de grabación en la memoria no volátil, que no tarda mas que 500ms. Durante el proceso el esclavo rsponde a las peticiones en la nueva dirección. Esta petición es la que permite sustituir esclavos dañados sin necesidad de reiniciar la red.
Reset de Esclavo: Est dispara el proceso que coloca el esclavo en su estado inicial, y tiene el mismo efecto que un reset de power-up o disparo por el puerto correspondiente de la interfaz 1 del esclavo. Este no puede tardar mas de 2 ms.
Eliminar dirección de Operación: El comando "Delete Address" es usado para apagar temporalmente la dirección de un esclavo y es usado en conjunto con "Address Assignment", porque sólo puede ser usado como un esclavo de dirección 0.
Por ejemplo, para cambiar la dirección de un esclavo, primero se usa la petición "Delete Address", y luego "Address Assignment". El esclavo reconoce que recibió una "Delete Address" sin errreos respondiendo como 0 (en hexadecimal), y reponde en esta dirección. Para restaurar la dirección anterior, un preciso que ocurra unreset en el esclavo.
Leer Status: Esta petición es usada para obtener el valor del registrador de estado del esclavo accesado. Su contenido regresa como respuesta del esclavo. El registrador contiene tres flags con el siguiente significado:
- S0: "Dirección Volátil". Este flag está activado cuando la rutina interna del esclavo que graba permanentemente una nueva dirección se esta ejecutando.
- S1: "Error Periférico". Este flag es activado cuando el esclavo detecta una entrada alta en el puerto FID de la interfaz 1, indicando una falla externa en el equipo.
- S3: "Leer error no-volátil". Este bit es activado cuando hay un error en la lectura de la memoria no volátil del esclavo, después de un reset.
El bit S2 no es utilizado y esta reservado para usos futuros. El maestro pued utilizar la información de estado de los esclavos para realizar funciones de diagnótico. Los esclavos de acuerdo con la especificación 2.0 no soportan el "Peripheral Error".
La difusión de las peticiones de este tipo es recibido por todos los esclavos y son caracterizados por no necesitar de una respuesta del esclavo. En este sentido son anormales en AS-i y hasta el hoy solamente una petición de reset es definida como broadcast.
7.6.2 A La Capa de Transmisión
La capa de transmisión también conocida como control de transmisión, es responsable de cambiar telegramas individuales con los esclavos. Este recibe del control de ejecución una petición de envio, junto con los datos que serán enviados a través del canal de comunicación, agregando el start bit, el bit de paridad y el el bit de fin, generan, por lo tanto, el frame (telegrama) del maestro. Este telegrama es enviado siguiendo los requisitos de tiempo del sistema de transmisión, de acuerdo con lo descrito en la sección 7.5.
Es posible que la petición del control de ejecución sea de dos tipos: transmisión única o transmissão única o repetible. En la primera forma, en caso de no haber respuesta del esclavo después del tiempo límite de espera o una respuesta no válida, el control de transmisión reporta el error a la capa superior, sin reenviar el telegrama. En la segunda forma, el error solo es reportado después de una segunda acción mas realizada. Por el contrario, en caso de que la transacción sea buena, el control de transmisión favorece al control de ejecución de los datos enviados por el esclavo, sin los bits adicionales de inicio, fin y de paridad. Tambein el control de transmisión debe reportar una señal AS-i Power Fail (APF), que indica baja tensión del mimite inferior en el bus AS-i.
La Figura 7.20 muestra la máquina de estados que modela el comportamiento del control de transmisión. MT viene de multiples transmisiones y significa que el control de transmisión repite el envio de un telegrama en caso de error en la primera vez.
Alternativamente, ST equivale a single transmission – transmisión única, y en este caso el error es reportado después de la primera falla. Las transiciones de estado ocurren en función de las operaciones lógicas representadas por los operadores en e y ou. Las entradas y salidad están separadas por una barra ("/").
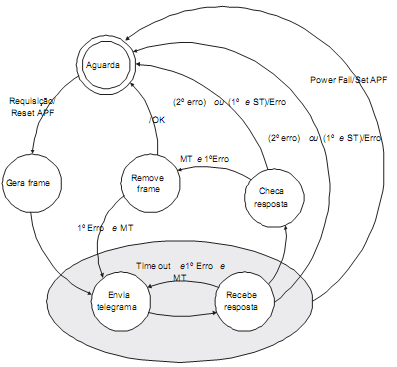
Figura 7.19: Control de Transmisión
Fuente: SANCHES, L.B. (2004)
7.6.3 El Control de Ejecución
El control de ejecución, o control de secuencia, es responsable de generar los telegramas AS-i en la secuencia correcta, utilizando el servicio de envío de frames individuales ejecutado por la capa inferior. Para ello posee un conjunto de campos de datos y listas que permiten mantener una imagen de la red AS-i y sus esclavos constantemente actualizada, y que a su vez es usada por la capa superior para implementar la interfaz con el host.
Estos campos de datos son representados como sigue:
Imagen de Datos de Entrada (IDI): Este campo contiene las copias más recientes de datos recibidos de los esclavos a través de la llamada "Solicitud de Datos - Data Request". Cada esclavo ocupa 4 bits de memoria.
Imagen de Datos de Salida (ODI): Este campo contiene los datos más recientes escritos por el host y son enviados a los esclavos a través de "Solicitud de Datos". Aqui también son necesarios cuatro bits para cada uno de los 62 esclavos.
Imagen de Datos de Entrada Analógica (AIDI): Este campo contiene los datos recibidos de las entradas analógicas de esclavos de acuerdo con los perfiles 7.3 y 7.4, analógicamente a los datos de IDI.
Imagen de Datos de Salida Analógica (AODI): Este campo, es semejante al anterior, contiene los valores más recientes que son enviados a las salidas analógicas.
Imagen de Datos de Configuración (CDI): campo contiene los códigos de I/O y los códigos ID de cada esclavo. Por lo tanto, son necesarios 2 bytes para cada esclavo.
Datos de Confifuración Permanente (PCD): Este campo es semejante al anterior, aunque en un área no volátil. Los códigos ID o la configuración de I/O de un esclavo no presentes en la red se establecen como un valor F (hexadecimal).
Imagen del Parámetro (PI): Esta área está reservada para los 4 bits de parámetros de cada esclavo. Por lo tanto, por cada dos esclavos se ocupa un byte.
Párametro Permanente: Este campo contiene los parámetros configurados de cada esclavo, y se encuentra en un área no volátil, como las PCD.
Lista de Esclavos Detectados (LDS): Cada esclavo corresponde a un bit de la lista, que es activado cuando el esclavo es detectado correctamente.
Lista de Esclavos Activados (LAS): En esta lista el bit correspondiente al esclavo es activado cuando es activado correctamente.
Lista de Esclavos Proyectados (LPS): Esta lista está en la memoria no volátil y representa los esclavos que se supone están conectados en la red AS-i cuando sea encendida..
En esta lista el bit correspondiente al esclavo es activado cuando se detecta una señal de alto en el esclavo FID (sección 7.4).
Además de estos campos de datos, el control de ejecución reporta al host estados del maestro a través de algunas banderas. Estas banderas son las siguientes:
- Config_OK: Este indicador es activado cuando la configuración nominal y la real detectada están de acuerdo. Se trata de una manera simple de obtener información al respecto de la configuración;
- LDS.0: Indica la presencia de un esclavo con dirección "0" - que no es permitido en operación normal;
- Auto_Address_Enable: Indica que el direccionamiento automático está activado;
- Auto_Address_Available: Indica que existen condiciones para ocurrir el direccionamiento automático *
- Mode: Indica si el maestre está en modo "Configuración" (1) o "Protegido" (0);
- Normal_Operation: Indica que el maestre está transitando ciclicamente entre las fases de operación normal;
- APF: "AS-i Power Fail" - Indica la tensión en el bus debajo del límite inferior;
- Offline_Ready: Activado cuando la fase offline está completa;
- Periphery_OK: Indica que la Lista de Perifericos de Falla está vacía;
- Offline: Cuando es activado por el usuario, lleva el maestre a la fase offline;;
- Data_Exchange_Active: Habilita el intercambio de datos entre el maestre y el esclavo.
* Por una cuestión de terminología, puede ocurrir confusión entre este flag y lo anterior. Notar que el primeiro esdefinido por el usuario, permitiendo el auto direccionamiento en caso de que las condiciones sean satisfactorias, lo que es indicado por el flag Auto_Address_Available
Es importante notar que cuatro de estos flags son habilitados por el usuario - host - y afectan el comportamiento del maestro: los dos últimos de la lista, el indicador "Auto_Address_Available" y el "Mode". Todos los demás no pueden ser alterados por el usuario y son controlados por el propio maestro.
El comportamiento del maestro es dividido en varias etapas, o fases, que son ejecutadas por el controle de ejecución.
La Figura 7.19 ilustra la máquina de estados que modela el comportamiento del control de ejecución. El área punteada indica el modo de operación normal, es decir, cuando el maestre realiza intercambio de datos cíclico con los esclavos configurados, manteniendo actualizada el área "Imagen de Datos de entrada" y los puertos de datos de acuerdo con el área "Imagen de Datos de Salida". Además del intercambio de datos de entrada y salida, realizada en la fase "Intercambio de Datos", en el ciclo de operación normal son intercambiadas información de gerenciamiento de la red en las otras dos etapas.
La operación detallada en cada una de las etapas permitirá conocer todo el comportamiento del control de ejecución, y consecuentemente de la mayor parte del maestro.
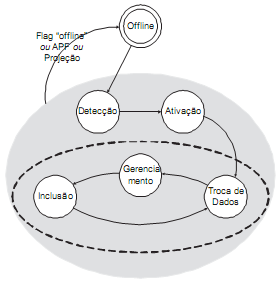
Figura 7.20: Fases (estados) de control de ejecución
Fuente: SANCHES, L.B. (2004)
7.6.4 Etapas de Transmisión
Después que la fuente de alimentación ha sido conectada, el maestro transita entre las diferentes fases (estados). El maestro inicia en la etapa offline, seguida de la etapa de detección, en que los esclavos conectados al bus son detectados. Después de ser detectados los esclavos son activados en la etapa siguiente, y están listos para entrar en el ciclo de operación normal (línea punteada en la Figura 7.20), compuesto de una etapa de intercambio de datos, una de gerenciamiento y una de inclusión. Asi como el ciclo entre las etapas de intercambio de datos, gerenciamiento e inclusión se identifica por su operación normal, la fase offline compone el inicio del maestro, en cuanto a las etapas de detección y activación componen el start-updel maestro.
Inicialización
La fase offline coloca al maestro en condiciones de iniciar sus operaciones. Durante este el campo "Imagen de Datos de Entrada" es puesto en cero (entradas inactivas), y el campo "Imagen de Datos de Salida" es puesto con “uno” (salidas inactivas), lo que garantiza un estado inicial conocido para todos los puertos de datos de los esclavos.
El maestro se puede traer a la fase offline de cualquer otra fase, por la activación del flag offline, que representa, por lo tanto, la función de reiniciar toda la red.
Puesta en marcha - Start-up
En la operación de start-up los escravos son detectados primero y después activados. En la fase de detección el maestro envía solicitudes de lectura de los códigos IO y ID de los esclavos, uno a uno. Los esclavos que responden correctamente a las solicitudes son considerados detectados, y pasan a ser parte de la Lista de Esclavos Detectados (LDS). Los respectivos códigos de IO y ID son almacenados en el campo de Imagen de Datos de Configuración (CDI). En la fase de ativación de los Modos de operación del maestro son considerados de la siguiente manera:
1. Configuración o;
2. Protegido (también llamado proyección).
En el modo de configuración todos los esclavos de la LDS son activados, a través del envio de una solicitud "Parámetro de Solicitud", en que las salidas de parámetros del esclavo son escritas, y de una "Solicitud de Datos", que escribe en los puertos correspondientes de los esclavos. Si el esclavo responde correctamente a estas dos solicitudes entonces esta activado, y pasa a ser parte de la LAS. En modo de proyección, sólamentelos esclavos presentes en la LDS, que también estan en la "Lista de Esclavos proyectados" y que tengan la misma configuración IO y los mismos códigos ID correspondientes de los campos no volátiles y que son activados. El maestro intercambia datos solo con los esclavos pré-configurados. Al final de la fase de activación es realizada una verificación, y en caso de que la configuración nominal (detectada) y la proyetada estén de acuerdo con el flag Config_OK es activado. Las Figuras 7.21 y 7.22 muestran los flujogramas que representa el comportamiento del maestro en las fases de detección y activación.
Operación Normal
El intercambio de datos de entrada y salida del proceso ocurre en la fase de intercambio de Datos o ("Data Exchange Phase"). La operación normal incluye a las fases de gerenciamiento ("Management Phase") y de Inclusión ("Inclusion Phase").
En las condiciones en que los sensores y actuadores están operando normalmente en la planta, conectados al bus AS-i, el maestro circula entre las tres fases que componen la condición de operación normal. En cada ciclo la fase de gerenciamiento viene directo a una transacción AS-i, el mismo ocurriendo con la fase de Inclusión. Este mecanismo permite mantener una alta velocidad de escaneo de todos los esclavos, actualizando sus datos de salida y leyendo los datos de entrada en una misma transacción, sin perjudicar las operaciones de gerenciamiento de la red que ocurren en las otras dos fases, y que pueden ser completadas en varios ciclos. La Figura 7.22 ilustra el comportamiento del maestro durante la fase del Intercambio de Datos. Véase que lacomunicacion con un esclavo precisa fallar a través de 3 ciclos para que el sea retirado de las listas de esclavos detectados (LDS) y de activados (LAS).
Esto garantiza un funcionamiento adecuado de la red en situaciones mas sujetas a ruidos causantes de fallas. En este último caso el flag Config_OK es desactivado.
Después de que la fase del Intercambio de Datos esta completa, el maestro entra en la fase de gerenciamiento. En esta fase se envían telegramas aciclicos a los esclavos. A diferencia de la fase de Intercambio de Datos, en que los esclavos activados son accesados antes de la siguiente fase, aquí apenas un telegrama es enviado, y por lo tanto las funciones necesitan de más de un telegrama para ser completadas son ejecutadas a través de varios ciclos.
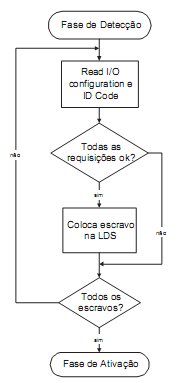
Figura 7.21: Flujograma de la fase de detección
Fuente: SANCHES, L.B. (2004)
En la fase de gerenciamiento el maestro hace uso de las diversas solicitudes posibles para ejecutar tareas solicitadas por el host. En caso de no haber ejecutado funciones, el maestro puede enviar telegramas de lectura de status, telegramas "burros" o hasta no enviar el mismo telegrama en esa fase. Después de la fase de gerenciamiento, sigue la fase de Inclusion, en el cual los esclavos nuevos se buscan al final de cada ciclo. Durante cada ciclo un esclavo es solicitado. Esta solicitud es realizada por el control de transmisión sin repetición en caso de error, porque el error no es critico. Si un esclavo que ya esta activado responde, o no responde, el próximo esclavo es solicitado, en la siguiente fase de activación. Si un esclavo que no fue activado hasta el momento responde, sus códigos ID son solicitados en las siguientes fases, y el LDS es actualizad.
En la siguiente fase, dependiendo del modo de operación del maestro o escalvo es activado, entrando en LAS. La activación es realizada enviando una solicitud de parámetros al esclavo, que son actualizados de acuerdo con el campo PI ("Parameter Image"). En la última etapa el maestro hace una solicitud de datos, enviando datos de entrada de acuerdo con una "Input Data Image".
Asi mismo la inclusión de un esclavo ocurre de la misma manera que los procedimientos de puesta en marcha. Si un esclavo con dirección 0 es detectado durante la fase de inclusión, incluso si un esclavo proyectado no esta presente, el direccionamiento automatico es bloqueado, desactivando el flag "Auto_Address_Available". Lo mismo ocurre cuando un esclavo encontrado no esta proyectado. El flagConfig_OK es activado al fin de cada fase de inclusión. é ativado ao fim de cada fase de inclusão. Luego de un nuevo ciclo comienza con la fase de Intercambio de Datos.
Cabe notar que cada fase del ciclo de operación normal alterna antre el grupo de esclavos de tipo A y del tipo B. Antes del surgimiento del direccionamiento extendido, esto no ocurria, pues no había los tipos de esclavos. Después de la versión 2.1, el ciclo ocurre alternadamente, como se ilustra en la Figura 7.23. Hay que resaltar, además, que los esclavos compatibles a la especificación anterior son accesados en todos los ciclos, ya que no tinene diferenciación A/B. De esta forma, el ciclo de escaneo de los datos en dirección extandida es el doble del anterior, pero los esclavos de compatibilidad anterior siguen realizando el intercambio de datos en el mismo tiempo que el ciclo anterior.
7.6.4 La Capa Maestra y la Interfaz 3
La interfaz del maestro como el host (interface 3) se define solo de forma lógica, dejando la forma de implementación a cargo del fabricante. Esta especificada por las normas solo en forma de funciones que el maestro debe atender. La capa maestra es la que hace la adaptación de estas funciones al host específico. Como se explico anteriormente el host normalmente es uno u otro sistema de bus de campo de jerarquía superior, como un PLC o una PC. Así, las formas de acceso al maestro, es por lo tanto, una red AS-i, si se hace de varias maneras. En caso de que el host fuera una PC, por ejemplo, el maestro puede estar en una placa conectada a la placa principal y accesada a través de drivers que implementan las funciones definidas por la interfaz 3 y adapatadas para este sistema en la capa maestra. Las posibilidades son virtualmente infinitas.
En caso que sea un PLC, el maestro casi siempre es un modulo externo, visto como un modulo de I/O comúnmente, y que es accesado por medio de áreas de memoria mapeadas adecuadamente. La implementación de la interface, es diferente del caso anterior. El mismo razonamiento aplica para el casp de losgateways AS-i. Existen en el mercado gateways AS-i para Profibus DP, para DeviceNet, para Modbus y otros.
Son pocas las funciones que llevan las capas inferiores a un intercambio efecivo de datos entre el maestro y el esclavo. La mayoría de ellos accesa a los campos de datos del maestro, que mantiene una imagen actualizada de la red a fin de obtener la información que necesitan. Las que llevan un intercambio de datos son ejecutadas en la fase de gerenciamiento, que puede enviar un telegrama directo en cada ciclo.
Las funciones:
- "Leer Datos de Entrada (Read Input Data)" y
- "Escribir Datos de Salida (Write Output Data)"
accesan los campos "Imagen del Dato de entrada (Input Data Image)" y "Imagen del Dato de Salida (Output DataImage)" a retornar o escribir los datos adecuadamente.
- "Parámetro Escribir (Write Parameter)"
escribe un conjunto de parámetros en el "Parámetro Imagen" y también se realiza una petición de escritura de parámetros en la fase de gerenciamiento. De esta forma, cuando una solicitud.
- "Parámetro Leer"
es realizada por el host no es necesario accesar al esclavo directamente, solo una imagen de los parámetros, que siempre está actualizada con los parámetros reales en los esclavos.
Además de estas funciones existen:
- "Obtener LDS - Get LDS"
- "Obtener LAS - Get LAS" y
- "Obtener LPS - Get LPS".
que regresan a las listas correspondientes, también acessando a los campos de datos adecuados del control de ejecución.
Los datos permanentes son acessados por
- "Get LPS";
- "Get Permanent Parameter";
- "Get Permanent Configuration";
y registrados por los correspondientes
- "Set LPS",
- "Set Permanent Parameter" y
- "Set Permanent Configuration".
Cabe notar que las funciones que registran datos permanentemente llevan al laestro a la offline, reiniciando su comportamiento.
Es posible leer los campos de configuración, a través de las funciones,
- "Read Actual Configuration Data" e
- "Read Parameter Image".
Las funciones
- "Project Actual Configuration Data" y
- "Project Actual Parameters"
Permiten implementar una de las características de AS-i que más contribuyen para la simplicidad de su uso: para ser capaz de almacenar una configuración detectada como permanente, de manera que la configuración de la red AS-i se hace bastante simple.
Por último, es posible obtener información al respecto del comportamiento del maestro a través de:
- "Get Flags"
y configurar por
- "Set Configuration Mode",
- "Set Offline Mode" e
- "Set Data Exchange Active".
que activan los flags correspondientes.
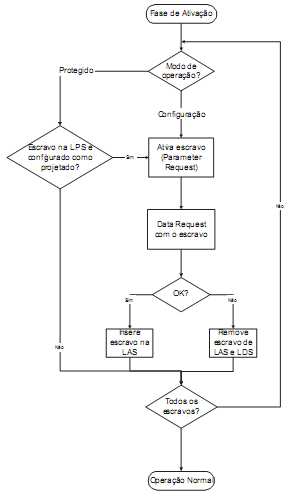
Figura 7.22: Flujograma de la fase de activación.
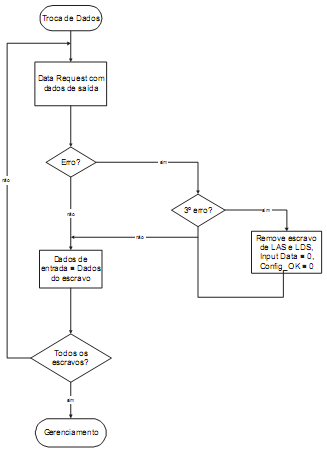
Figura 7.23: Flujograma de la fase de activación.
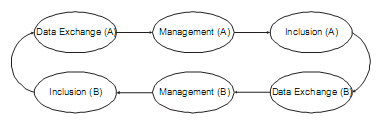
Figura 7.24: Ejecución de operación normal de control con direccionamiento extendido
Fuente: SANCHES, L.B. (2004)
Expansíon Seguridad en el Trabajo
Con AS-i Safety Work es posible conectar componentes de seguridad (componentes seguros), tales como una clave de emergencia y barreras de seguridad directamente a la red AS-i. El objetivo es agregar funciones relacionadas con la seguridad personal y de equipos. No hay necesidad de cambios o expansión en el sistema existente. Debido a que los componentes de seguridad y de monitoreo trabajan con el protocolo estandar AS-i.
Solo se necesita agregar los componentes de seguridad en el sistema. El monitoreo de seguridad no es realizado por el maestro de la red. Para ello, se requiere un componente seguro en una red es el safe monitor(monitor seguro).
El monitor no interfere en el tráfico de frames de la red, solo monitorea el tráfico, utilizandolo para determinar el estado de seguridad. De esta forma, las máquinas y plantas pueden ser ajustadas a un estado seguro a través de las salidas del monitor de seguridad. Por ejemplo de una red con componentes seguros como se muestra en la Figura 8.1.
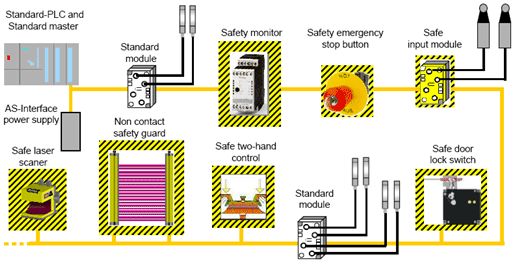
Figura 8.1: Rede AS-i con componentes de seguridad y componentes comunes.
Fuente: AS-International Association (2008).
Limitaciones de AS-i
La red AS-i fue desarrollada y optimizada para uso en aplicaciones debajo de los buses de campo. Asi mismo, algunas capacidades de los buses de campo de alto nivel no puedem ser realizadas en AS-i. Algunas limitaciones deben ser conocidas.
- Los datos transmitidos en AS-i son limitados a 4 bits por esclavos que pueden ser cambiados a cada ciclo. Los Mensajes largos pueden ser transmitidos dividiendólas en varios ciclos. Esto puede ser usado en procesos dinámicos lentos, como presión o temperatura (valores analógicos).
- AS-i es estrictamente maestro-esclavo, con exploración cíclica por esclavos. Esto impede la transmisión asíncrona por los sensores y actuadores. Los esclavos deben esperar 10 ms (en caso de una red con 62 esclavos) hasta ser llamado nuevamente.
- La transferencia de datos de esclavo a escravo sólo es posible a través del maestro.
- La limitación de longitum del cable es de 100m sin el uso de repetidores. Esta limitación física se debe al mantenimiento de otros criterios como el tiempo de ciclo de la red, tipo de topología libre y sin exigencia de resistores de terminación.
Normas y reglamentos
Los componentes de la red AS-i y su instalación deben estar de acuerdo con las siguientes normatividades y con base en sus últimas revisiones.
- Obligaciones legales (incluyendo la Electricity Ordinance, Cápitulo 406);
- IEC 364: Instalaciones Eléctricas en Edificios;
- IEC 60947-1: Medio de Control y Switcheo de Bajo-voltaje – Part 1: Reglas Generales;
- IEC 529: Grados de protection para envolventes (Código IP);
- IEC 439: Control de montaje de equipos y Switcheo de Bajo-voltaje;
- IEC 62026-1: Medio de Control y Switcheo de Bajo-voltaje – Controlador-interfaces de dispositivos (CDIs);
- IEC 62026-2: Interfaz Actuador - Sensor (AS-i);
- IEC 61131-2: Controladores Programables – Part 2: Requisitos para equipos y pruebas;
- IEC 61076-2-101: Conectores para equipos electrónicos: Part 2-101 Conectores redondos (M8 & M12);
- EN 954-1: Seguridad de maquinaria. Seguridad en las partes del sistema de control. Principios generales para diseño;
- CISPR 11: Equipos de radio-frecuencia (ISM) Industrial, cientifico y medico – Caracteristicas de disturbiosElectromagneticos – Limites y métodos de medición.
Además de las normas y reglamentos citados anteriormente, se deben considerar también los regulamentoslocales de instalaciones, inspecciones y pruebas de equipos.
Referencias
Bibliografia
- ATAIDE, F.H. (2004). Estudo Técnico EST-DE-0007-04 - AS-Interface, Nova Smar S/A, febrero.
- BECKER, R.; MÜLLER, B.; SCHIFF, A.; SCHINKE, T.; and WALKER, H. (2002). AS-Interface - The Automation Solution, AS-International Association, Alemania.
- ERCEGOVAC, M.; LANG, T.; and MORENO, J.H. (2000). .Introducción a los Sistemas Digitales, Bookman.
- LIAN, S.C.P. (2003). AS-i Master Bus Controller. Tesis presentada en la Escuela de Información de Tecnología e Ingeniería Electrica, de la Universidad de Queensland, junio.
- MADELUNG, O.W. and KRIESEL, W.R. (1999). AS-Interface - The Automation Solution, Hanser.
- SANCHES, L.B. (2004). Estudo Técnico EST-DE-0087-04 – Protótipo AS-i, Nova Smar S/A, agosto.
- SILVA, W.A.C.M. (2008). Notas del Curso en la Escuela Superior de Tecnologia en Automatización, CEFET-RN, Disponible en: http://www.cefetrn.br/~walmy/RI_A3.pdf. Último Acceso en: 16 de septiembre.
- STANDARDS AUSTRALIA. (2000). Low-voltage switchgear and controlgear - controller-device interfaces (cdis), Part 2: Interfaz Actuador-sensor (AS-i).
- SYSTEM ENGINEERS (2008). General Technical Specification, Actuator Sensor Interface (AS-i). Disponível em: http://www.myelectrical.com/pages/tools/downloads/Acutuator Sensor Interface (AS-I) Specification.pdf. Último Acceso: 16 de septiembre.
- Virtual Academy of AS-Internacional Association. Disponible en: http://www.as-interface.net/academy/content/sys/start/start.en.html. Último Acesso: 17 de noviembre de 2008.
- WIKI AS-INTERFACE (2008). AS-Interface. Disponible en: http://en.wikipedia.org/wiki/AS-Interface. Último Acceso: 13 de septiembre
Información Adicional
Para mayor información sobre la tecnologia AS-i, visite también los siguientes sitios.
AS-i International: http://www.as-interface.net/
AS-Interface UK Expert Alliance: http://www.as-interface.com/
Soluciones confiables

