
O protocolo HART – Milhões de aplicações ao redor do mundo

O HART (Highway Addressable Remote Transducer) é sem dúvida o protocolo com mais aplicações em campo, tendo vantagens com os equipamentos inteligentes e utilizando-se da comunicação digital de forma flexível sob o sinal 4-20mA para a parametrização e monitoração das informações.
Introduzido em 1989, tinha a intenção inicial de permitir fácil calibração, ajustes de range e damping de equipamentos analógicos. Foi o primeiro protocolo digital de comunicação bidirecional que não afetava o sinal analógico de controle.
Este protocolo tem sido testado com sucesso em milhares de aplicações, em vários segmentos, mesmo em ambientes perigosos. O HART permite o uso de mestres: um console de engenharia na sala de controle e um segundo mestre no campo, por exemplo um laptop ou um programador de mão.
Em termos de performance, podemos citar como características do HART:
- Comprovado na prática, projeto simples, fácil operação e manutenção.
- Compatível com a instrumentação analógica;
- Sinal analógico e comunicação digital;
- Opção de comunicação ponto-a-ponto ou multidrop;
- Flexível acesso de dados usando-se até dois mestres;
- Suporta equipamentos multivariáveis;
- 500ms de tempo de resposta (com até duas transações);
- Totalmente aberto com vários fornecedores;
As especificações continuamente são atualizadas de tal forma a atender todas as aplicações. Exemplo disto são o HART 7 e o wirelessHART. Para mais detalhes sobre o wirelessHART, consulte: https://www.smar.com.br/pt/artigos-tecnicos
O HART não define apenas um protocolo de comunicação digital, mas define também o meio físico, categorias de equipamentos, linguagem de descrição de equipamentos (EDDL) para integração nos sistemas de automação, ferramentas com versatilidade e flexibilidade de configuração, parametrização, calibração e até mesmo técnicas de aplicação. Uma vez que o padrão dominante para controle de processos na indústria ainda é o 4-20 mA, nada mais natural que aproveitar o próprio par de fios da malha de corrente para a comunicação digital. Assim, a infra-estrutura é aproveitada, bem como os sistemas de controle analógicos existentes.
Veremos a seguir alguns detalhes do protocolo HART.
A simplicidade: o HART e o loop de corrente convencional
As figuras 1 e 2 nos mostram como entender o HART facilmente. Na figura 1, temos um loop de corrente analógica, onde os sinais de um transmissor variam a corrente que passa por ele de acordo com o processo de medição. O controlador detecta a variação de corrente através da tensão sob um resistor sensor de corrente. A corrente de loop varia de 4 a 20mA para freqüências usualmente menores que 10 Hz.
A figura 2 é baseada na figura 1, onde o HART foi acrescido. Agora ambas terminações do loop possuem um modem e um amplificador de recepção, sendo que este possui alta impedância de tal forma a não carregar o loop de corrente. Note ainda que o transmissor possui uma fonte de corrente com acoplamento AC e o controlador uma fonte de tensão com acoplamento AC.A chave em série com a fonte de tensão no controlador HART em operação normal, fica aberta.No controlador HART os componentes adicionais podem ser conectados no loop de corrente, como mostrado ou através do resistor sensor de corrente.Do ponto de vista AC, o resultado é o mesmo, uma vez que a fonte de alimentação é um curto-circuito.Note que o sinal analógico não é afetado, uma vez que os componentes adicionados são acoplados em AC. O amplificador de recepção freqüentemente é considerado como parte do modem e usualmente não é mostrado separadamente.Na figura 2 foi desenhado separadamente para mostrar como se deriva o sinal de tensão de recepção. O sinal de recepção não é somente AC, nem no controlador ou mesmo no transmissor.
Para enviar uma mensagem, o transmissor ao ligar sua fonte de corrente, fará com que se sobreponha um sinal de corrente de 1 mA pico-a-pico de alta freqüência sobre o sinal analógico da corrente de saída. O resistor R no controlador converterá este sinal em tensão no loop e esta será amplificada no receptor chegando até ao demodulador do controlador (modem). Do mesmo modo, para enviar uma mensagem ao transmissor, o controlador fecha sua chave, conectando sua fonte de tensão que sobrepõe um tensão de aproximadamente 500 mV pico-a-pico através do loop. Esta é vista nos terminais do transmissor e encaminhada ao amplificador e demodulador. Note que existe uma implicação na figura 2 que é que o mestre transmita como fonte de tensão enquanto o escravo, como fonte de corrente.A figura 3 mostra detalhes do sinal HART, sendo que as amplitudes podem variar de acordo com as impedâncias e capacitâncias de cada equipamento e perdas causadas por outros elementos no loop.O HART se utiliza do FSK, chaveamento por mudança de freqüência(Frequency Shift keying), onde a freqüência de 1200 Hz representa o 1 binário e a de 2200 Hz, representa o 0 binário.Note que estas freqüências estão bem acima da faixa de freqüências do sinal analógico(0 a 10 Hz) de tal forma que não há interferências entre elas.Para assegurar uma comunicação confiável, o protocolo HART especifica uma carga total do loop de corrente, incluindo as resistências dos cabos, de no mínimo 230 Ohms e no máximo 1100 Ohms.
.png)
Figura 1 – Loop de corrente convencional
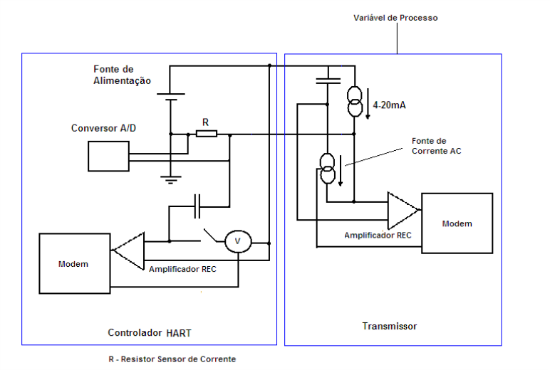
Figura 2 – Loop de corrente acrescido o HART
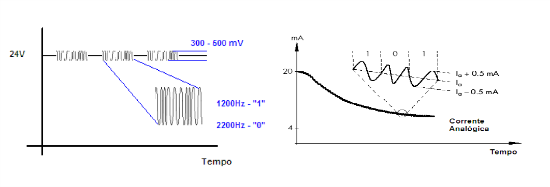
Figura 3 – Modulação e sinal HART
Equipamentos de campo e handhelds (programadores de mão) possuem um modem FSK integrado, onde via port serial ou USB de um PC ou laptop pode-se conectar uma estação externamente. A figura 4 mostra uma conexão típica HART de campo. Veremos posteriormente, outros tipos de conexões.
Para detalhes de um configurado HART de mão, consulte: https://pt.scribd.com/doc/237444453/Hpc401gsg-Pt
Para detalhes de uma interface USB-HART, consulte: http://www.smarnet.com.br/litnet/Catalogospdf/HI321CP.pdf
.jpg)
Figura 4 – Elementos típicos de uma instalação HART
.jpg)
Figura 5 – Conexão HART ponto-a-ponto
Em uma conexão do tipo ponto-a-ponto, como a da figura 5, é necessário que o endereço do equipamento seja configurado para zero, desde que se use o modo de endereço na comunicação para acessá-lo.
Em sistemas considerado grandes, pode-se utilizar-se de multiplexadores para acessar grandes quantidades de equipamentos HART, como por exemplo, na figura 6, onde o usuário deverá selecionar o loop de corrente para comunicar via Host. Nesta situação em cascata, o host pode comunicar com vários equipamentos(mais do que 1000), todos com endereços zero.
Ainda podemos ter rede em multidrop e condições de split-range. Na figura 7a, na conexão em multidrop, observe que podem ser ligados no máximo até 15 transmissores em paralelo na mesma linha. A figura 7b mostra uma instalação típica HART. A corrente que passa pelo resistor de 250 Ohms (foi ocultado na figura) será alta, causando uma alta queda de tensão.
Portanto, deve-se assegurar que a tensão da fonte de alimentação seja adequada para suprir a tensão mínima de operação.
No modo multidrop a corrente fica fixa em 4mA, servindo apenas para energizar os equipamentos no loop.
.jpg)
Figura 6 - Conexão HART via multiplexador
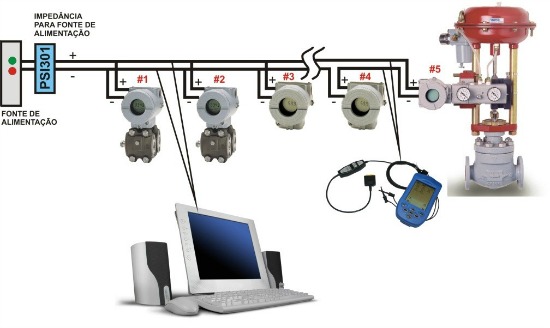
Figure 7a – Conexão HART em Multidrop
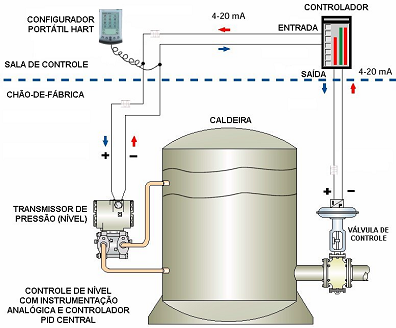
Figura 7b - Esquema de instalação HART típica
A condição de split-range é usada em uma situação especial onde normalmente dois posicionadores de válvulas recebem o mesmo sinal de controle, por exemplo, um operando com corrente nominal de 4 a 12 mA e o outro de 12 a 20 mA. Nesta condição, os poscionadores são conectados em série no loop de corrente com endereços diferentes e o host será capaz de distingui-los via comunicação.Veja figura 8.

Figura 8 – Conexão HART via Split Range
Como visto anteriormente, o HART se utiliza do sinal de 4-20mA, sobrepondo um sinal em técnica FSK, chaveamento por mudança de freqüência (Frequency Shift keying), onde a freqüência de 1200 Hz representa o 1 binário e a de 2200 Hz representa o 0 binário.Cada byte individual do telegrama do layer 2 é transmitido em 11 bits, usando-se 1200 kHz.
Cabeamento
Utiliza-se um par de cabos trançados onde se deve estar atento à resistência total já que esta colabora diretamente com a carga total, e agindo na atenuação e distorção do sinal. Em longas linhas e sujeitas a interferências, recomenda-se o cabo com shield, sendo este aterrado em um único ponto, preferencialmente no negativo da fonte de alimentação.
Layer 2
O protocolo HART opera segundo o padrão Mestre-Escravo, onde o escravo somente transmitirá uma mensagem se houver uma requisição do mestre. A figura 9 mostra de maneira simples o modelo de troca de dados entre mestre e escravo. Toda comunicação é iniciada pelo mestre e o escravo só responde algo na linha se houve um pedido para ele.Existe todo um controle de tempo entre envios de comandos pelo mestre.Inclusive existe um controle de tempo entre mestres quando se tem dois mestres no barramento.
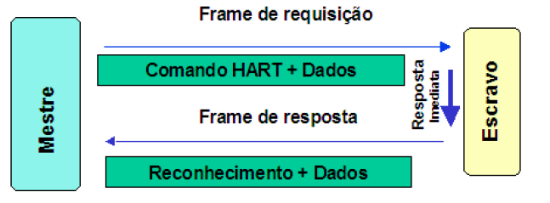
Figura 9 – Frame HART
Taxa de atualização das variáveis
Cada mensagem entre mestre e escravo inclui os endereços de origem e de destino, além de um byte de verificação para detectar possíveis problemas na mensagem. O status do equipamento de campo está sempre presente em todas as respostas para o mestre. Tomando como média 25 bytes por mensagem, temos 50 bytes para pergunta e resposta. Cada byte leva cerca de 10 ms à taxa de 1200 bps. Cada transação demora então 50x10 = 500 ms, ou seja, é possível executar apenas 2 transações por segundo.
Controle das transações HART
O bloco que controla as transações HART corresponde à camada 2 do modelo OSI, ou seja, à Data Link Layer. Sendo mestre-escravo, cada transação tem origem no mestre. A resposta do escravo indica o recebimento do comando e pode eventualmente conter dados dependendo do comando enviado. Sendo half-duplex, após a transmissão de cada mensagem, a portadora FSK deve ser desligada para dar a chance de outro equipamento usar a rede. O controle da portadora deve ser tal que ela seja ligada no máximo 5 bits antes do início da mensagem (preâmbulo) e desligada no máximo 5 bits depois do final da mensagem (checksum). Cada mestre é responsável pelo controle das transações. Caso não haja resposta para uma mensagem dentro do intervalo de tempo limite, o mestre deve retransmitir o comando. Após a quantidade programada de retransmissões (usualmente 3) o mestre deve abortar a transação. Após cada pergunta ou resposta, o mestre espera um curto intervalo de tempo antes de enviar outro comando, dando chance do outro mestre se comunicar. Dessa forma os mestres intercalam transações no mesmo par de fios.
Modo BURST
Para aumentar a taxa de transações alguns equipamentos possuem o modo BURST, que é opcional pela norma HART. Nesse modo, o mestre configura o escravo (comandos 107, 108 e 109) que então envia ciclicamente mensagens contendo as variáveis dinâmicas selecionadas. Então, uma vez que cada mensagem típica tem cerca de 25 bytes, é possível obter de 3 a 4 atualizações por segundo. Após cada mensagem BURST, o equipamento aguarda um breve intervalo de tempo para dar a chance do mestre iniciar uma transação interrompendo o modo BURST ou requisitando um outro comando HART. Apenas um equipamento pode estar em modo BURST no mesmo par de fios.
A convivência de vários protocolos em uma mesma planta
Daqui para frente é esperado que a convivência entre vários protocolos torne-se uma constante, principalmente onde o parque instalado for grande e deseja-se preservar os investimentos feitos. A figura 10 é um exemplo típico de sistema onde se tem em uma mesma planta os protocolos Foundation Fieldbus e HART.Neste caso, uma interface HART-FF, o HI302, é utilizado, permitindo conexões ponto-a-ponto e multidrop. O HI302 é uma ponte entre equipamentos HART e sistemas Foundation Fieldbus, possui 8 canais HART master e permite ao usuário executar manutenção, calibração, monitoramento de status do sensor, status geral do equipamento, dentre outras informações.
.jpg)
Figura 10 - IntegraçãoFoundation Fieldbus e HART usando o HI302
A figura 11 é um exemplo típico de sistema onde se tem em uma mesma planta os protocolos Profibus e HART.Neste caso, uma interface HART- Profibus-DP, é utilizada, permitindo conexões ponto-a-ponto e multidrop e que possui 8 canais HART mestres e permite ao usuário executar manutenção, calibração, monitoramento de status do sensor, status geral do equipamento, dentre outras informações.
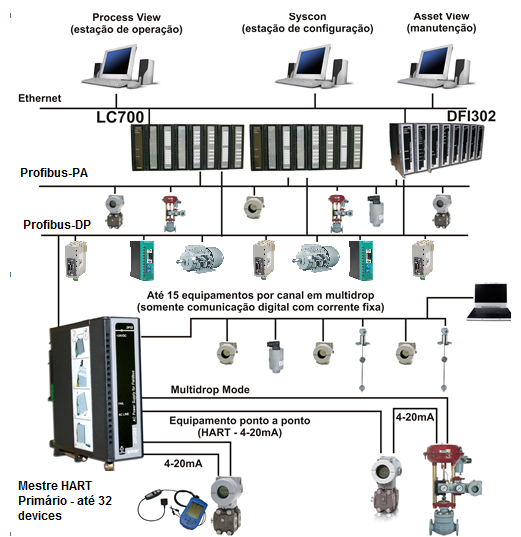
Figura 11 – Exemplo de IntegraçãoHART sobre Profibus
A Profibus International definiu um perfil de implementação do HART sobre o Profibus. Neste caso, através do conceito de Profibus DP remote I/O, tem-se oHART fornecendo mensagens através das remotas, onde:
- A comunicação HART é feita via comunicação acílica usando serviços baseados no DP-V1;
- O Mestre HART controla as comunicações no barramento HART com os instrumentos e estes são designados dispositivos servidores do HART;
- Pode-se ter um DTM CommPROFIBUS fornecendo a conexão para a rede Profibus;
- Pode-se ter um Gateway HART acima do componente DTMCommPROFIBUS para acessar os canais de I/O;
- O DTM do instrumento HART é colocado acima do DTM do Gateway HART para conectar o instrumento de forma acíclica via comunicação (DP-V1). No caso do HART sobre Profibus pode ser estabelecida esta comunicação usando FDT (Mestre Classe 2) de acordo com a Remota.
A extensão Profibus DP-V1 contêm melhorias orientadas aos processos de automação, principalmente nas comunicações acíclicas de dados envolvendo parametrização, operação, visualização e calibração de dispositivos inteligentes de campo(equipamentos Profibus-PA), em conjunto com as comunicações cíclicas que são de alta prioridade.A acíclica é executada em paralelo com a comunicação cíclica, mas com prioridade inferior. Isso permite o acesso online as estações, utilizando ferramentas de engenharia. Podemos ter mestres Profibus suportanto os dois serviços e atuando como mestres classe 1 e 2 ou mesmo, mestres separados, onde
o mestre classe 1 detem o token e executa a troca de dados cíclica com cada escravo e passa o token para o mestre classe 2 que estabelece a comunicação acíclica com qualquer escravo, troca dados e retorna o token para o mestre classe 1.
.png)
Figura 12a – Esquema do stack HART sobre o Profibus
O uso de FDT e DTMs na configuração de equipamentos HART
A tecnologia baseada em FDT( Field Device Tool) e DTM(Device Type Manager) permite ao usuário ganhar versatilidade e flexibilidade de configuração, parametrização, calibração e principalmente mecanismos de download e upload durante a fase de planejamento/comissionamento dos projetos.
É uma tecnologia aberta, e que permite que um DTM de um equipamento de campo rode em qualquer frame application suportando FDT e ainda permite usar um único ambiente de software para integrar produtos de diferentes fabricantes e protocolos. O DTM é um “driver”, ou seja, é um componente de software (DLL, EXE) que representa cada equipamento que estiver na planta. Este “driver” obedece à norma FDT e pode ser usado em qualquer Frame Application, independente do fabricante.A figura 12 mostra um configurador baseado nesta tecnologia e o DTM do LD301.
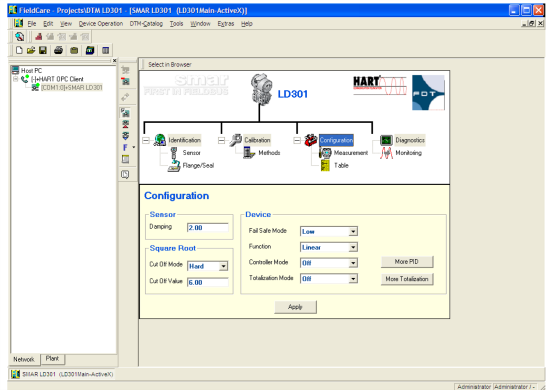
Figura 12b - Configurador baseado nesta tecnologia e o DTM do LD301
Explorando os recursos do HART
HCC301: conversor de HART para 4-20mA
O HCC301 é um conversor a dois fios capaz de gerar um sinal de corrente 4-20mA através de uma variável via comunicação HART. Com isto podemos transferir mais informações de equipamentos HART aos controladores e melhorar a performance dos controles e processos com uma solução de baixo custo.
Este conversor tem a capacidade de trabalhar como mestre primário do barramento HART e continuamente fazer o “polling” de uma variável em um outro equipamento HART, convertendo a mesma dinamicamente a um valor em corrente de 4-20mA proporcional a uma escala pré-configurada.Mesmo sendo um mestre primário, o HCC301 permite livremente que se tenha um mestre secundário no barramento, como por exemplo, um hand-held.
Esta variável atualizada em corrente pode ser a variável primária em unidade de engenharia, a variável primária em percentagem ou também uma das variáveis dinâmicas do equipamento HART: a variável secundária, terciária ou a quarta variável. O equipamento HART pode ser de qualquer fabricante, o que dá mais flexibilidade e recursividade ao usuário.
Pode-se configurar no conversor a condição de falha segura segundo a NAMUR-NE43, onde em uma falha, este gerará um sinal de corrente de acordo com a seleção do usuário(3.6 ou 21mA), de tal forma que o controlador possa tomar uma ação segura.O usuário ainda configura o número de “retries” de comunicação até que o conversor gere a corrente em falha segura.
Em nível de segurança, pode-se ainda habilitar a proteção de escrita evitando alterações não autorizadas.
Veja mais detalhes no diagrama de blocos funcional na figura 13.
.JPG)
Figura 13 – Diagrama funcional do HCC301
Durante a configuração do HCC301, este deve ser configurado para escravo, o que é feito localmente no equipamento.A figura 14, mostra a tela de configuração do conversor utilizando-se um hand-held(PALM, HI331 e PC Windows Smar), onde podemos ver a simplicidade para o usuário:
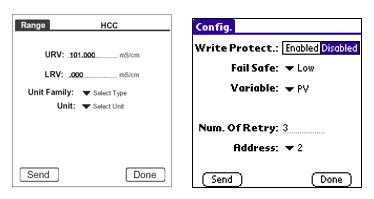
Figura 14 – Tela de Configuração do HCC301
Algumas aplicações com o HCC301
Aumentando a segurança e confiabilidade em elementos finais de controle
A grande maioria dos posicionadores de válvulas HART do mercado não possuem um sinal de retorno indicando a posição real da válvula e quando possuem, exigem ligações a 4 fios, dificultando e aumentando custos de instalação.A solução normalmente adotada, é a utilização de um transmissor de posição, mas que envolve custos e exige instalação adequada.Com isto, é muito freqüente se ver no campo o posicionador recebendo um setpoint de posição desejada via controlador, mas o controle não tem um sinal de feedback, dizendo se a válvula realmente foi para a posição desejada, se está emperrada, se está lenta, como está o controle seu controle, etc...
Observe a figura 15, onde temos um posicionador de válvulas. Poderíamos a um baixo custo estar extraindo via comunicação HART a posição real da válvula e fornecê-la proporcionalmente a 4-20mA para o sistema de controle, melhorando condições de performance, reduzindo custos com a minimização da variabilidade do processo, além de aumentar significativamente a confiabilidade do sistema.Note que em termos de instalação, nada é feito no posicionador.
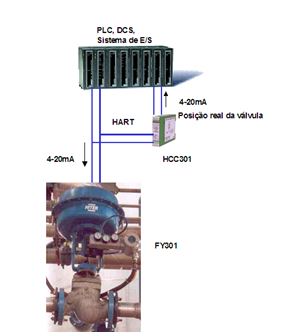
Figura 15 – Aumentando a segurança e confiabilidade em elementos finais de controle
Minimizando custos nos processos de medição de densidade e concentração
Analisemos a situação da figura 16, onde temos um transmissor HART de densidade/concentração e que além da medida primária(densidade ou concentração) queremos fornecer ao controle um sinal de corrente do processo de temperatura.Normalmente, colocaria-se mais um transmissor de temperatura no processo e assim teríamos a medição da temperatura.Porém, usando o HCC301, poderíamos a um baixo custo estar extraindo via comunicação HART a temperatura do processo, que é medida pelo transmissor e fornecê-la proporcionalmente a 4-20mA para o sistema de controle, melhorando condições de performance, reduzindo custos.Note que em termos de instalação, nada é feito no transmissor.
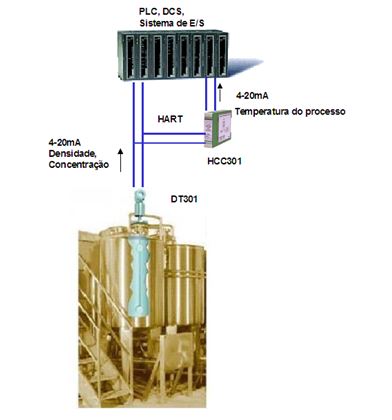
Figura 16 – Minimizando custos nos processos de medição de densidade e concentração
Medição da temperatura ambiente ou em escala diferente nos processos de temperatura
Analisemos a situação de aplicação de acordo com a figura 17, onde tem-se um forno operando de 50 a 200°C, e o valor da temperatura é fornecida ao sistema de controle proporcionalmente através de um sinal de 4-20mA.Poderia-se medir esta temperatura em uma escala diferente, com propósitos somente de monitoração por exemplo, ou ainda estarmos informando a temperatura ambiente. Usando o HCC301, poderíamos a um baixo custo estar extraindo via comunicação HART estas informações e fornecê-las proporcionalmente a 4-20mA para o sistema de controle, melhorando condições de performance, reduzindo custos.Note que em termos de instalação, nada é feito no transmissor.
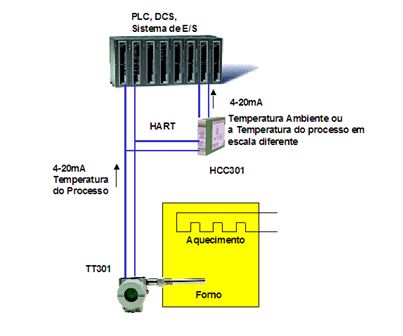
Figura 17 – Medição da temperatura ambiente ou em escala diferente nos processos de temperatura
Medição multivariável: vazão
Analisemos agora a situação da figura 18, onde temos um transmissor de pressão utilizando-se de um elemento primário para medição de vazão.Poderia-se por exemplo, via conversor HCC301, disponibilizar a pressão diferencial ao sistema de controle, uma vez que a variável primária do transmissor foi configurada como vazão.Note que em termos de instalação, nada é feito no transmissor.
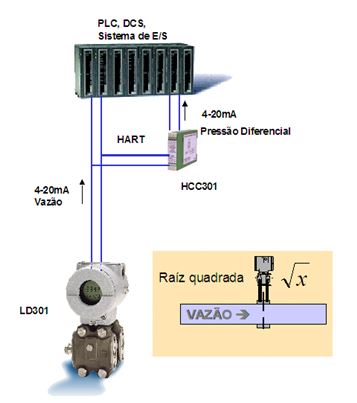
Figura 18 – Medição multivariável
Conclusão
Pudemos ver alguns detalhes do protocolo aberto HART, com uma visão um pouco diferente do que se tem em nível de usuário, isto é, envolvendo detalhes técnicos deste padrão e aplicações explorando seus recursos. Além disso, vimos a integração com outros protocolos digitais e o uso do FDT e DTM na configuração HART.
A mudança do controle de processo da tecnologia 4-20 mA para as redes digitais e sistemas abertos já se encontra num estágio de maturidade tecnológica e usuários colhendo seus benefícios. Essa mudança é encarada como um processo natural demandado pelos novos requisitos de qualidade, confiabilidade e segurança do mercado. A sua utilização traz uma vantagem competitiva, no sentido que essa nova tecnologia traz aumentos de produtividade pela redução das variabilidades dos processos e redução dos tempos de indisponibilidade das malhas de controle.
Autor
- César Cassiolato
Referências
- Artigos Técnicos – César Cassiolato
- Material de Treinamento HART – César Cassiolato
- Revista Controle&Instrumentação, www.controleinstrumentacao.com.br
- https://www.smar.com.br/pt/artigos-tecnicos
- https://www.smar.com.br/pt
Soluções Confiáveis

